O sistema consiste em três componentes principais – a Unidade de Comando de Lançamento, o Conjunto de Tubo de Lançamento e o próprio míssil.
Unidade de Lançamento de ComandoEdit

Picture L-R NFOV, WFOV, day lenses

O artilheiro transporta um unidade de lançamento reutilizável (para além da montagem do tubo de lançamento) mais comummente referida como uma CLU (pronuncia-se “pista”) e é a componente alvo das duas…sistema de peças. A CLU tem três vistas que são usadas para encontrar, apontar e disparar o míssil e também pode ser usada separadamente do míssil como mira térmica portátil. Já não é necessário que a infantaria esteja em contacto constante com os porta-aviões blindados e tanques com miras térmicas. Isto torna o pessoal de infantaria mais flexível e capaz de perceber ameaças que de outra forma não seriam capazes de detectar. Em 2006, foi adjudicado um contrato à Toyon Research Corporation para iniciar o desenvolvimento de uma actualização à CLU, permitindo a transmissão de imagem alvo e dados de localização GPS a outras unidades.
Day Field of ViewEdit
A primeira vista é uma vista de 4× dia de ampliação. É utilizada principalmente para varrer áreas à luz visível durante o funcionamento de dia. É também usada para varrer após o nascer e pôr-do-sol, quando a imagem térmica é difícil de focar devido ao rápido aquecimento e/ou arrefecimento natural da Terra.
WFOV (Wide Field of View)Edit
A segunda vista é a vista nocturna com 4× de ampliação, e mostra ao atirador uma representação térmica da área vista. Esta é também a vista primária utilizada devido à sua capacidade de detectar radiação infravermelha e encontrar tanto tropas como veículos demasiado bem escondidos para detectar. O ecrã mostra uma vista de “escala verde” que pode ser ajustada tanto em contraste como em luminosidade. O interior da CLU é arrefecido por uma pequena unidade de refrigeração ligada à vista. Isto aumenta muito a sensibilidade da capacidade de imagem térmica, uma vez que a temperatura dentro da visão é muito mais baixa do que a dos objectos que detecta. Devido à sensibilidade que isto provoca, o artilheiro é capaz de “focalizar” o CLU para mostrar uma imagem detalhada da área a ser visualizada, mostrando diferenças de temperatura de apenas alguns graus. O artilheiro opera esta vista com a utilização de duas estações manuais semelhantes à vara de controlo encontrada nos cockpits modernos. É a partir desta vista que o artilheiro foca a imagem e determina a área que dá a melhor assinatura térmica para bloquear o míssil.
NFOV (Narrow Field of View)Edit
O terceiro campo de visão é uma visão térmica 12× utilizada para melhor identificar o veículo alvo. Uma vez focado o CLU na WFOV, o artilheiro pode mudar para NFOV para reconhecimento do alvo antes de activar o Seeker FOV.
Após ser escolhida a melhor área de alvo, o artilheiro pressiona um dos dois gatilhos e é automaticamente mudado para a quarta vista; o Seeker FOV, que é uma vista térmica de 9x de ampliação. Este processo é semelhante à funcionalidade de zoom automático na maioria das câmaras modernas. Esta vista também está disponível juntamente com as vistas anteriormente mencionadas, todas as quais podem ser acedidas com o premir de um botão. No entanto, não é tão popular como uma vista de alta ampliação leva mais tempo a digitalizar uma vasta área. Esta vista permite ao artilheiro apontar mais longe o míssil e definir o sistema de orientação alojado no interior do míssil real. É quando nesta visão a informação é passada da CLU, através da electrónica de ligação do Conjunto do Tubo de Lançamento, e para o sistema de orientação do míssil. Se o artilheiro se sentir desconfortável com o disparo do míssil, ainda pode voltar para as outras vistas sem ter de disparar o míssil. Quando o artilheiro se sente confortável com a imagem do alvo, ele puxa o segundo gatilho e estabelece uma “fechadura”. O míssil é lançado após um curto atraso.
CLUEdit leve
O exército dos EUA está a desenvolver uma nova CLU como uma melhoria em relação à versão do Bloco I. A nova CLU é 70% mais pequena, 40% mais leve, e tem um aumento de 50% na duração da bateria. As características da CLU leve são: um sensor IR de onda longa; um visor de alta definição com resolução melhorada; tiras de mão integradas; uma câmara a cores de cinco megapixéis; um ponto laser que pode ser visto visivelmente ou através de IR; um localizador de alvo distante usando GPS, um telémetro laser, e um sensor de rumo; e electrónica modernizada.
Launch Tube AssemblyEdit
Bem o artilheiro e o portador de munições transportam um tubo descartável chamado Launch Tube Assembly, que aloja o míssil e protege o míssil de ambientes agressivos. O tubo também tem construído em electrónica e um sistema de dobradiças de bloqueio que torna a fixação e a desmontagem do míssil de e para a Unidade de Lançamento de Comando um processo rápido e simples.
MissileEdit
WarheadEdit
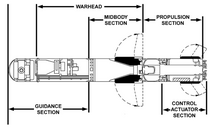

A ogiva tandem do míssil Javelin é do tipo HEAT. Esta ogiva utiliza uma carga de forma explosiva para criar um fluxo de metal superplasticamente deformado, formado a partir de forros metálicos em forma de trombeta. O resultado é um fluxo estreito de partículas de alta velocidade que pode penetrar a armadura.
O Javelin conta o advento da armadura reactiva explosiva (ERA). Caixas ou azulejos ERA deitados sobre a armadura principal de um veículo explodem quando são atingidos por uma ogiva. Esta explosão não prejudica a blindagem principal do veículo, mas faz com que painéis de aço voem através do caminho do fluxo estreito de partículas de uma ronda HEAT, perturbando o seu foco e deixando-a incapaz de cortar através da blindagem principal. O Javelin usa duas ogivas de carga em forma de carga em tandem. A fraca carga precursora HEAT, de menor diâmetro, empurra através da ERA sem a detonar, e perfura um canal através dela para a ogiva HEAT de diâmetro muito maior, que depois penetra na armadura primária do alvo.
Um revestimento de duas camadas de molibdénio é utilizado para o precursor e um revestimento de cobre para a ogiva principal.
Para proteger a carga principal da explosão explosiva, choque, e detritos causados pelo impacto do nariz do míssil e pela detonação da carga precursora, é utilizado um escudo antiexplosão entre as duas cargas. Este foi o primeiro escudo de explosão de material composto e o primeiro que tinha um furo no meio para fornecer um jacto menos difuso.
Um revestimento de carga principal mais recente produz um jacto de maior velocidade. Embora tornando a ogiva menor, esta alteração torna-a mais eficaz, deixando mais espaço para o propulsor do motor principal do foguetão, e aumentando assim o alcance do míssil.
Electronic arming and fusing, chamado Electronic Safe Arming and Fire (ESAF), é utilizado. O sistema ESAF permite que o processo de disparo e armamento prossiga, impondo ao mesmo tempo uma série de verificações de segurança do míssil. A ESAF indica o motor de lançamento após o gatilho ser premido. Quando o míssil alcança um ponto chave de aceleração (indicando que desobstruiu o tubo de lançamento), a ESAF inicia um segundo sinal de armamento para disparar o motor de voo. Após outra verificação das condições do míssil (verificação do bloqueio do alvo), a ESAF inicia o armamento final para permitir a detonação das ogivas após o impacto do alvo. Quando o míssil atinge o alvo, a ESAF permite a função de ogiva tandem (fornecer tempo apropriado entre a detonação da carga precursora e a detonação da carga principal).
Embora a ogiva tandem HEAT do Javelin se tenha mostrado eficiente na destruição de tanques, a maioria das ameaças contra as quais foi utilizada no Iraque e no Afeganistão foram tripulações e equipas de armamento, edifícios, e veículos ligeiramente blindados e não blindados. Para tornar o Javelin mais útil nestes cenários, o Centro de Investigação, Desenvolvimento e Engenharia de Aviação e Mísseis desenvolveu uma ogiva multiusos (MPWH) para a FGM-148F. Embora ainda seja letal contra tanques, a nova ogiva tem uma caixa de ogivas de aço naturalmente fragmentada que duplica a eficácia contra o pessoal devido a uma maior fragmentação. A MPWH não acrescenta peso nem custo e tem um corpo médio de míssil composto mais leve para permitir a substituição dos tubos Javelin existentes. O modelo Javelin F está planeado para começar as entregas no início de 2020; o desenho melhorado do míssil, juntamente com uma nova CLU mais leve com um rastreador de alvos melhorado, entrou em produção em Maio de 2020.
PropulsionEdit

A maioria dos lançadores de foguetes requer uma grande área livre atrás do artilheiro para evitar ferimentos causados por explosão traseira. Para colmatar esta falha, sem aumentar o recuo para um nível inaceitável, o sistema Javelin utiliza um mecanismo de lançamento suave. Um motor de lançamento usando propulsor de foguetão convencional ejeta o míssil do lançador, mas deixa de arder antes de o míssil limpar o tubo. O motor de lançamento só é inflamado após um atraso para permitir uma folga suficiente por parte do operador. Para poupar peso, os dois motores são integrados com um disco de ruptura entre eles; é concebido para tolerar a pressão do motor de lançamento de um lado, mas para romper facilmente do outro quando o motor de lançamento se inflama. Os motores utilizam um bocal comum, com o escape do motor de lançamento a fluir através do motor de lançamento gasto. Como a caixa do motor de lançamento permanece no lugar, uma ignição anular (em forma de anel) invulgar é utilizada para o ligar; uma ignição normal seria soprada pela parte de trás do míssil quando o motor de lançamento se incendiasse e poderia ferir o operador. Uma vez que o motor de lançamento utiliza um propulsor padrão da OTAN, a presença de beta-resorcinol de chumbo como modificador da taxa de combustão faz com que uma quantidade de chumbo e óxido de chumbo esteja presente no escape; por esta razão, pede-se aos lançadores que sustem a respiração após o disparo.
Na eventualidade de o motor de lançamento funcionar mal e o tubo de lançamento estar sobrepressurizado – por exemplo, se o foguetão ficar preso – o míssil Javelin inclui um sistema de libertação de pressão para evitar que o lançador expluda. O motor de lançamento é mantido no lugar por um conjunto de pinos de cisalhamento, que se fracturam se a pressão subir demasiado e permitem que o motor seja empurrado para fora da parte de trás do tubo.
SeekerEdit
Como um míssil de fogo e esquecimento, após o lançamento o míssil tem de ser capaz de seguir e destruir o seu alvo sem o artilheiro. Isto é feito através do acoplamento de um sistema IR de imagem a bordo (diferente do sistema de imagem CLU) com um sistema de seguimento a bordo.
O artilheiro utiliza o sistema IR da CLU para encontrar e identificar o alvo e depois muda para o sistema IR independente do míssil para definir uma caixa de seguimento em torno do alvo e estabelecer uma fechadura. O artilheiro coloca parênteses à volta da imagem para o bloqueio.
O requerente permanece focado na imagem do alvo continuando a localizá-lo à medida que o alvo se move ou a trajectória de voo do míssil se altera ou à medida que os ângulos de ataque mudam. O requerente tem três componentes principais: matriz de plano focal (FPA), refrigeração e calibração e estabilização.
Matriz de plano focal (FPA)Editar
A montagem do Seeker está encapsulada numa cúpula que é transparente à radiação infravermelha de onda longa. A radiação IV passa através da cúpula e depois através de lentes que focalizam a energia. A energia IV é reflectida por espelhos sobre a FPA. O buscador é um FPA bidimensional de 64 × 64 elementos detectores MerCad (HgCdTe). O FPA processa os sinais dos detectores e retransmite um sinal para o rastreador do míssil.
A matriz estelar é um dispositivo foto-voltaico onde os fotões incidentes estimulam os electrões e são armazenados, pixel a pixel, em circuitos integrados de leitura ligados na parte de trás do detector. Estes electrões são convertidos em tensões que são multiplexadas para fora do ROIC numa base quadro a quadro.
Cooling/calibrationEdit
Para funcionar eficazmente, o FPA deve ser arrefecido e calibrado. Noutras aplicações, os detectores IR de uma CLU são arrefecidos utilizando um frasco de Dewar e um motor Stirling de ciclo fechado, mas não há espaço suficiente no míssil para uma solução semelhante. Antes do lançamento, um refrigerador montado no exterior do tubo de lançamento activa os sistemas eléctricos do míssil e fornece gás frio de um expansor Joule-Thomson para o conjunto do detector de mísseis enquanto o míssil ainda está no tubo de lançamento. Quando o míssil é disparado, esta ligação externa é quebrada e o gás refrigerante é fornecido internamente por uma garrafa de gás de argônio a bordo. O gás é mantido numa pequena garrafa a alta pressão e contém líquido de refrigeração suficiente para a duração do voo de aproximadamente 19 segundos.
O buscador é calibrado utilizando uma roda de helicóptero. Este dispositivo é um ventilador de seis lâminas: cinco lâminas pretas com baixa emissividade de infravermelhos e uma lâmina semi-reflectora. Estas lâminas giram em frente da óptica do Seeker de forma sincronizada, de modo que a FPA é continuamente fornecida com pontos de referência para além da visualização da cena. Estes pontos de referência permitem à FPA reduzir o ruído introduzido pelas variações de resposta nos elementos detectores.
EstabilizaçãoEditar
A plataforma em que o Seeker está montado deve ser estabilizada em relação ao movimento do corpo do míssil e o Seeker deve ser movido para se manter alinhado com o alvo. O sistema de estabilização tem de lidar com acelerações rápidas, movimentos para cima/baixo e laterais. Isto é feito por um sistema de cardan, acelerómetros, giroscópios de massa giratória (ou MEMS), e motores para accionar mudanças na posição da plataforma. O sistema é basicamente um piloto automático. A informação dos giroscópios é alimentada pela electrónica de orientação que acciona um motor de binário ligado à plataforma do buscador para manter o buscador alinhado com o alvo. Os fios que ligam o Seeker ao resto do míssil são cuidadosamente concebidos para evitar a indução de movimento ou arrasto na plataforma do Seeker.
TrackerEdit

O rastreador é a chave para orientação/controlo de um eventual ataque. Os sinais de cada um dos 4.096 elementos detectores (matriz de 64×64 pixels) no localizador são passados para os circuitos integrados de leitura FPA, que lê depois cria uma moldura de vídeo que é enviada para o sistema localizador para processamento. Ao comparar os quadros individuais, o localizador determina a necessidade de corrigir de modo a manter o míssil no alvo. O localizador deve ser capaz de determinar qual a parte da imagem que representa o alvo. O alvo é inicialmente definido pelo artilheiro, que coloca uma armação configurável à sua volta. O rastreador utiliza então algoritmos para comparar essa região da moldura com base em dados de imagem, geométricos e de movimento com as novas molduras de imagem enviadas pelo requerente, semelhantes aos algoritmos de reconhecimento de padrões. No final de cada moldura, a referência é actualizada. O rastreador é capaz de acompanhar o alvo mesmo que o ponto de vista do requerente possa mudar radicalmente durante o voo.
Para orientar o míssil, o rastreador localiza o alvo na moldura actual e compara esta posição com o ponto de mira. Se esta posição estiver fora do centro, o rastreador calcula uma correcção e passa-a para o sistema de orientação, que faz os ajustes adequados às quatro barbatanas traseiras móveis, bem como a oito asas fixas no meio do corpo. Este é um piloto automático. Para guiar o míssil, o sistema tem sensores que verificam se as barbatanas estão posicionadas conforme solicitado. Caso contrário, o desvio é enviado de volta para o controlador para ajustes adicionais. Este é um controlador de loop fechado.
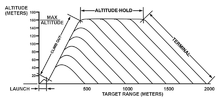
Existem três fases no voo gerido pelo rastreador: 1) uma fase inicial logo após o lançamento; 2) uma fase intermédia que dura a maior parte do voo; e 3) uma fase terminal na qual o rastreador selecciona o ponto de impacto mais eficaz. Com algoritmos de orientação, o piloto automático utiliza dados do requerente e do rastreador para determinar quando deve fazer a transição do míssil de uma fase de voo para outra. Dependendo de o míssil estar em modo de ataque de topo ou de ataque directo, o perfil do voo pode mudar significativamente. O modo de ataque de topo exige que o míssil suba acentuadamente após o lançamento e navegue a grande altitude e depois mergulhe no topo do alvo (bola curva). No modo de ataque directo (fastball), o míssil navega a uma altitude inferior directamente no alvo. A trajectória de voo exacta que tem em conta o alcance até ao alvo é calculada pela unidade de orientação.