Il sistema consiste di tre componenti principali – la Command Launch Unit, il Launch Tube Assembly e il missile stesso.
Command Launch UnitEdit

Picture L-R NFOV, WFOV, lenti diurne

L’artigliere trasporta una unità di lancio di comando riutilizzabile (oltre al gruppo tubo di lancio) più comunemente indicato come un CLU (pronunciato “clue”) ed è il componente di puntamento del sistema a due parti.sistema a due parti. La CLU ha tre viste che sono usate per trovare, mirare e sparare il missile e può anche essere usata separatamente dal missile come un mirino termico portatile. La fanteria non è più costretta a rimanere in costante contatto con i veicoli corazzati per il trasporto di personale e i carri armati con mirini termici. Questo rende il personale di fanteria più flessibile e in grado di percepire minacce che altrimenti non sarebbe in grado di rilevare. Nel 2006, un contratto è stato assegnato a Toyon Research Corporation per iniziare lo sviluppo di un aggiornamento del CLU che consente la trasmissione di immagini del bersaglio e dati di posizione GPS ad altre unità.
Campo visivo diurnoModifica
La prima vista è una vista diurna con ingrandimento 4×. Viene utilizzata principalmente per la scansione di aree in luce visibile durante il funzionamento alla luce del giorno. Viene anche utilizzata per la scansione dopo l’alba e il tramonto, quando l’immagine termica è difficile da mettere a fuoco a causa del rapido riscaldamento e/o raffreddamento naturale della Terra.
WFOV (Wide Field of View)Edit
La seconda vista è la vista notturna con ingrandimento 4× e mostra all’artigliere una rappresentazione termica dell’area vista. Questa è anche la vista primaria utilizzata per la sua capacità di rilevare la radiazione infrarossa e trovare sia truppe che veicoli altrimenti troppo ben nascosti per essere rilevati. Lo schermo mostra una vista in “scala verde” che può essere regolata sia in contrasto che in luminosità. L’interno del CLU è raffreddato da una piccola unità di refrigerazione attaccata al mirino. Questo aumenta notevolmente la sensibilità della capacità di imaging termico, poiché la temperatura all’interno del mirino è molto più bassa di quella degli oggetti che rileva. Grazie alla sensibilità che ne deriva, l’artigliere è in grado di “mettere a fuoco” il CLU per mostrare un’immagine dettagliata dell’area visualizzata, mostrando differenze di temperatura di pochi gradi. L’artigliere opera questa vista con l’uso di due stazioni manuali simili alla cloche di controllo che si trova nei cockpit moderni. È da questa vista che il mitragliere mette a fuoco l’immagine e determina l’area che dà la migliore firma di calore su cui bloccare il missile.
NFOV (Narrow Field of View)Edit
Il terzo campo di vista è un mirino termico 12× usato per identificare meglio il veicolo bersaglio. Una volta che la CLU è stata messa a fuoco in WFOV, il mitragliere può passare a NFOV per il riconoscimento del bersaglio prima di attivare il Seeker FOV.
Una volta scelta la migliore area di destinazione, il mitragliere preme uno dei due grilletti e viene automaticamente passato alla quarta vista; il Seeker FOV, che è una vista termica con ingrandimento 9x. Questo processo è simile alla funzione di zoom automatico sulla maggior parte delle fotocamere moderne. Questa vista è anche disponibile insieme alle viste precedentemente menzionate, tutte accessibili con la pressione di un pulsante. Tuttavia, non è così popolare come una vista ad alto ingrandimento richiede più tempo per la scansione di una vasta area. Questa vista permette all’artigliere di mirare ulteriormente il missile e di impostare il sistema di guida alloggiato all’interno del missile stesso. È in questa visuale che le informazioni passano dalla CLU, attraverso l’elettronica di connessione del Launch Tube Assembly, e nel sistema di guida del missile. Se il mitragliere non si sente a suo agio con il lancio del missile, può comunque tornare indietro alle altre viste senza dover sparare il missile. Quando il mitragliere è a suo agio con l’immagine del bersaglio, preme il secondo grilletto e stabilisce un “blocco”. Il missile viene lanciato dopo un breve ritardo.
Leggero CLUEdit
L’esercito americano sta sviluppando un nuovo CLU come miglioramento rispetto alla versione Block I. Il nuovo CLU è il 70 per cento più piccolo, il 40 per cento più leggero, e ha un aumento della durata della batteria del 50 per cento. Le caratteristiche del leggero CLU sono: un sensore IR a onde lunghe; un display ad alta definizione con una risoluzione migliorata; manopole integrate; una fotocamera a colori da cinque megapixel; un punto laser che può essere visto visivamente o attraverso IR; un localizzatore di bersagli lontani che utilizza GPS, un telemetro laser e un sensore di direzione; e un’elettronica modernizzata.
Launch Tube AssemblyEdit
Sia il mitragliere che il portatore di munizioni portano un tubo monouso chiamato Launch Tube Assembly, che ospita il missile e lo protegge da ambienti difficili. Il tubo ha anche un’elettronica incorporata e un sistema di cerniere di bloccaggio che rende l’attacco e il distacco del missile da e verso l’unità di lancio di comando un processo rapido e semplice.
MissileEdit
WarheadEdit
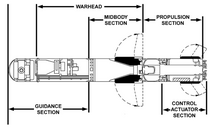

La testata tandem del missile Javelin è di tipo HEAT. Questo round utilizza una carica esplosiva sagomata per creare un flusso di metallo deformato superplasticamente formato da rivestimenti metallici a forma di tromba. Il risultato è uno stretto flusso di particelle ad alta velocità che può penetrare l’armatura.
Il Javelin contrasta l’avvento delle armature reattive esplosive (ERA). Le scatole o piastrelle ERA che si trovano sopra l’armatura principale di un veicolo esplodono quando vengono colpite da una testata. Questa esplosione non danneggia l’armatura principale del veicolo, ma fa sì che i pannelli d’acciaio volino attraverso il percorso dello stretto flusso di particelle di un proiettile HEAT, interrompendo il suo fuoco e lasciandolo incapace di tagliare l’armatura principale. Il Javelin usa due testate a carica sagomata in tandem. La carica precursore HEAT, debole e di piccolo diametro, spinge attraverso l’ERA senza innescarla, e crea un canale attraverso di essa per la testata HEAT di diametro molto maggiore, che poi penetra la corazza primaria del bersaglio.
Un rivestimento di molibdeno a due strati è usato per il precursore e un rivestimento di rame per la testata principale.
Per proteggere la carica principale dall’esplosione, dallo shock e dai detriti causati dall’impatto del muso del missile e dalla detonazione della carica precursore, viene usato uno scudo anti-esplosione tra le due cariche. Questo è stato il primo scudo antiaereo in materiale composito e il primo ad avere un foro nel mezzo per fornire un getto meno diffuso.
Un nuovo rivestimento della carica principale produce un getto a velocità più elevata. Mentre rende la testata più piccola, questo cambiamento la rende più efficace, lasciando più spazio per il propellente per il motore a razzo principale, e quindi aumentando la portata del missile.
Si usa l’armamento elettronico e la fusione, chiamata Electronic Safe Arming and Fire (ESAF). Il sistema ESAF permette al processo di armamento e di fuoco di procedere, mentre impone una serie di controlli di sicurezza sul missile. L’ESAF dà il via al motore di lancio dopo aver premuto il grilletto. Quando il missile raggiunge un punto chiave di accelerazione (che indica che ha lasciato il tubo di lancio), l’ESAF avvia un secondo segnale di armamento per accendere il motore di volo. Dopo un altro controllo delle condizioni del missile (controllo dell’aggancio del bersaglio), l’ESAF avvia l’armatura finale per abilitare le testate alla detonazione all’impatto con il bersaglio. Quando il missile colpisce il bersaglio, l’ESAF abilita la funzione della testata tandem (fornire un tempo appropriato tra la detonazione della carica precursore e la detonazione della carica principale).
Anche se la testata HEAT tandem del Javelin si è dimostrata efficiente nel distruggere i carri armati, la maggior parte delle minacce contro cui è stata impiegata in Iraq e Afghanistan erano equipaggi e squadre d’arma, edifici e veicoli leggermente blindati e non blindati. Per rendere il Javelin più utile in questi scenari, l’Aviation and Missile Research, Development, and Engineering Center ha sviluppato una testata multiuso (MPWH) per l’FGM-148F. Mentre è ancora letale contro i carri armati, la nuova testata ha un involucro in acciaio a frammentazione naturale che raddoppia l’efficacia contro il personale grazie alla frammentazione potenziata. Il MPWH non aggiunge peso o costi e ha un corpo centrale del missile in materiale composito più leggero per consentire la sostituzione drop-in ai tubi Javelin esistenti. Il modello F del Javelin dovrebbe iniziare le consegne all’inizio del 2020; il design migliorato del missile, insieme al nuovo CLU più leggero con un migliore inseguitore di bersagli, è entrato in produzione nel maggio 2020.
PropulsionEdit

La maggior parte dei lanciarazzi richiede un’ampia area libera dietro l’artigliere per evitare lesioni da contraccolpi. Per affrontare questa lacuna, senza aumentare il rinculo a un livello inaccettabile, il sistema Javelin utilizza un meccanismo di lancio morbido. Un motore di lancio che utilizza propellente per razzi convenzionali espelle il missile dal lanciatore, ma smette di bruciare prima che il missile esca dal tubo. Il motore di volo si accende solo dopo un ritardo per consentire una distanza sufficiente dall’operatore. Per risparmiare peso, i due motori sono integrati con un disco di scoppio tra di loro; è progettato per tollerare la pressione del motore di lancio da un lato, ma per rompersi facilmente dall’altro quando il motore di volo si accende. I motori usano un ugello comune, con lo scarico del motore di volo che scorre attraverso il motore di lancio espulso. Poiché l’involucro del motore di lancio rimane al suo posto, viene usato un insolito accenditore anulare (a forma di anello) per avviarlo; un accenditore normale verrebbe soffiato fuori dalla parte posteriore del missile quando il motore di volo si accende e potrebbe ferire l’operatore. Poiché il motore di lancio utilizza un propellente standard della NATO, la presenza di piombo beta-resorcinolo come modificatore del tasso di combustione provoca la presenza di una quantità di piombo e ossido di piombo nello scarico; per questo motivo, gli artiglieri sono invitati a trattenere il respiro dopo lo sparo.
Nel caso in cui il motore di lancio non funzioni e il tubo di lancio sia in sovrapressione – per esempio, se il razzo si blocca – il missile Javelin include un sistema di rilascio della pressione per evitare che il lanciatore esploda. Il motore di lancio è tenuto in posizione da una serie di perni di taglio, che si rompono se la pressione aumenta troppo e permettono al motore di essere spinto fuori dalla parte posteriore del tubo.
SeekerEdit
Come un missile fire-and-forget, dopo il lancio il missile deve essere in grado di tracciare e distruggere il suo obiettivo senza il mitragliere. Questo viene fatto accoppiando un sistema di imaging IR a bordo (diverso dal sistema di imaging della CLU) con un sistema di tracciamento a bordo.
Il mitragliere usa il sistema IR della CLU per trovare e identificare il bersaglio, poi passa al sistema IR indipendente del missile per impostare un track box intorno al bersaglio e stabilire un blocco. Il mitragliere posiziona delle staffe intorno all’immagine per il bloccaggio.
Il cercatore rimane concentrato sull’immagine del bersaglio continuando a tracciarlo mentre il bersaglio si muove o la traiettoria di volo del missile si altera o quando gli angoli di attacco cambiano. Il seeker ha tre componenti principali: il focal plane array (FPA), il raffreddamento e la calibrazione e la stabilizzazione.
Focal plane array (FPA)Edit
Il gruppo seeker è racchiuso in una cupola che è trasparente alla radiazione infrarossa a onde lunghe. La radiazione IR passa attraverso la cupola e poi attraverso delle lenti che focalizzano l’energia. L’energia IR viene riflessa da specchi sull’FPA. Il cercatore è un FPA bidimensionale che fissa 64×64 elementi rivelatori MerCad (HgCdTe). L’FPA elabora i segnali dai rilevatori e trasmette un segnale al tracker del missile.
La matrice di puntamento è un dispositivo foto-voltaico in cui i fotoni incidenti stimolano elettroni e sono immagazzinati, pixel per pixel, in circuiti integrati di lettura fissati sul retro del rilevatore. Questi elettroni sono convertiti in tensioni che sono multiplexate fuori dal ROIC su una base di frame per frame.
Raffreddamento/calibrazioneModifica
Per funzionare efficacemente, la FPA deve essere raffreddata e calibrata. In altre applicazioni, i rivelatori IR di una CLU sono raffreddati usando un pallone Dewar e un motore Stirling a ciclo chiuso, ma non c’è spazio sufficiente nel missile per una soluzione simile. Prima del lancio, un refrigeratore montato all’esterno del tubo di lancio attiva i sistemi elettrici del missile e fornisce gas freddo da un espansore Joule-Thomson al gruppo rivelatore del missile mentre il missile è ancora nel tubo di lancio. Quando il missile viene lanciato, questa connessione esterna viene interrotta e il gas refrigerante viene fornito internamente da una bottiglia di gas argon a bordo. Il gas è tenuto in una piccola bottiglia ad alta pressione e contiene abbastanza refrigerante per la durata del volo di circa 19 secondi.
Il cercatore è calibrato utilizzando una ruota chopper. Questo dispositivo è un ventilatore di sei lame: cinque lame nere a bassa emissività IR e una lama semi-riflettente. Queste lame girano davanti all’ottica del cercatore in modo sincronizzato in modo che l’FPA sia continuamente fornito di punti di riferimento oltre a visualizzare la scena. Questi punti di riferimento permettono alla FPA di ridurre il rumore introdotto dalle variazioni di risposta negli elementi del rivelatore.
StabilizzazioneModifica
La piattaforma su cui è montato il seeker deve essere stabilizzata rispetto al movimento del corpo del missile e il seeker deve essere spostato per rimanere allineato con il bersaglio. Il sistema di stabilizzazione deve far fronte a rapide accelerazioni, movimenti su/giù e laterali. Questo viene fatto da un sistema cardanico, accelerometri, giroscopi a massa rotante (o MEMS), e motori per guidare i cambiamenti di posizione della piattaforma. Il sistema è fondamentalmente un autopilota. Le informazioni provenienti dai giroscopi sono inviate all’elettronica di guida che aziona un motore di coppia attaccato alla piattaforma del cercatore per mantenere il cercatore allineato con il bersaglio. I cavi che collegano il seeker con il resto del missile sono accuratamente progettati per evitare di indurre movimento o resistenza sulla piattaforma seeker.
TrackerEdit

Il tracker è fondamentale per la guida/controllo per un eventuale colpo. I segnali da ciascuno dei 4.096 elementi rivelatori (array di 64×64 pixel) nel cercatore sono passati ai circuiti integrati di lettura FPA che leggono poi crea un fotogramma video che viene inviato al sistema tracker per l’elaborazione. Confrontando i singoli fotogrammi, il tracker determina la necessità di correggere in modo da mantenere il missile sul bersaglio. Il tracker deve essere in grado di determinare quale porzione dell’immagine rappresenta il bersaglio. Il bersaglio è inizialmente definito dal mitragliere, che pone una cornice configurabile intorno ad esso. Il tracker usa poi degli algoritmi per confrontare quella regione del fotogramma basata su dati di immagine, geometrici e di movimento con i nuovi fotogrammi dell’immagine inviati dal cercatore, in modo simile agli algoritmi di riconoscimento dei modelli. Alla fine di ogni fotogramma, il riferimento viene aggiornato. Il tracker è in grado di tenere traccia del bersaglio anche se il punto di vista del cercatore può cambiare radicalmente nel corso del volo.
Per guidare il missile, il tracker individua il bersaglio nel frame corrente e confronta questa posizione con il punto di mira. Se questa posizione è fuori centro, il tracker calcola una correzione e la passa al sistema di guida, che fa le regolazioni appropriate alle quattro pinne di coda mobili, così come alle otto ali fisse a metà corpo. Questo è un autopilota. Per guidare il missile, il sistema ha dei sensori che controllano che le pinne siano posizionate come richiesto. In caso contrario, la deviazione viene rimandata al controllore per ulteriori regolazioni. Si tratta di un controller a circuito chiuso.
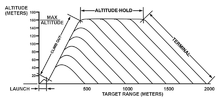
Ci sono tre fasi nel volo gestite dal tracker: 1) una fase iniziale subito dopo il lancio; 2) una fase intermedia che dura per la maggior parte del volo; e 3) una fase terminale in cui il tracker seleziona il punto di impatto più efficace. Con gli algoritmi di guida, l’autopilota utilizza i dati del cercatore e del tracker per determinare quando passare il missile da una fase di volo all’altra. A seconda che il missile sia in modalità attacco dall’alto o attacco diretto, il profilo del volo può cambiare significativamente. La modalità di attacco dall’alto richiede che il missile salga bruscamente dopo il lancio e navighi ad alta quota per poi tuffarsi sulla cima del bersaglio (palla curva). Nella modalità di attacco diretto (fastball), il missile naviga ad una quota inferiore direttamente sul bersaglio. L’esatta traiettoria di volo, che tiene conto della distanza dal bersaglio, è calcolata dall’unità di guida.