Le système se compose de trois éléments principaux – l’unité de lancement de commande, l’ensemble tube de lancement et le missile lui-même.
Unité de lancement de commandeModification

Photo G-D NFOV, WFOV, lentilles de jour

Le mitrailleur transporte une unité de lancement de commande réutilisable (en plus de l’ensemble de tube de lancement) plus communément appelée CLU (prononcé « clue ») et constitue le composant de ciblage du système en deux parties.système en deux parties. Le CLU a trois vues qui sont utilisées pour trouver, cibler et tirer le missile et peut également être utilisé séparément du missile comme viseur thermique portable. L’infanterie n’a plus besoin de rester en contact permanent avec les véhicules blindés de transport de troupes et les chars équipés de viseurs thermiques. Le personnel de l’infanterie est ainsi plus flexible et capable de percevoir des menaces qu’il ne pourrait pas détecter autrement. En 2006, un contrat a été attribué à Toyon Research Corporation pour commencer le développement d’une mise à niveau du CLU permettant la transmission d’images de cibles et de données de localisation GPS à d’autres unités.
Field of ViewEdit
La première vue est une vue de jour à grossissement 4×. Elle est principalement utilisée pour scanner des zones en lumière visible pendant le fonctionnement de jour. Elle est également utilisée pour scanner après le lever et le coucher du soleil, lorsque l’image thermique est difficile à focaliser en raison du réchauffement et/ou du refroidissement rapide naturel de la Terre.
La deuxième vue est la vue de nuit à grossissement 4×, et montre au tireur une représentation thermique de la zone visualisée. C’est également la vue principale utilisée en raison de sa capacité à détecter les rayonnements infrarouges et à trouver à la fois des troupes et des véhicules autrement trop bien cachés pour être détectés. L’écran affiche une vue « échelle verte » dont le contraste et la luminosité peuvent être réglés. L’intérieur du CLU est refroidi par une petite unité de réfrigération fixée au viseur. Cela augmente considérablement la sensibilité de la capacité d’imagerie thermique puisque la température à l’intérieur du viseur est beaucoup plus basse que celle des objets qu’il détecte. Grâce à cette sensibilité, le tireur est capable de « focaliser » le CLU pour montrer une image détaillée de la zone visualisée en montrant des différences de température de quelques degrés seulement. L’artilleur utilise cette vue à l’aide de deux postes de commande semblables au manche que l’on trouve dans les cockpits modernes. C’est à partir de cette vue que le tireur focalise l’image et détermine la zone qui donne la meilleure signature thermique sur laquelle verrouiller le missile.
NFOV (Narrow Field of View)Edit
Le troisième champ de vision est une visée thermique 12× utilisée pour mieux identifier le véhicule cible. Une fois que le CLU a été mis au point en WFOV, l’artilleur peut passer en NFOV pour la reconnaissance de la cible avant d’activer le Seeker FOV.
Une fois que la meilleure zone cible est choisie, l’artilleur appuie sur l’une des deux gâchettes et passe automatiquement à la quatrième vue ; le Seeker FOV, qui est une vue thermique à grossissement 9x. Ce processus est similaire à la fonction de zoom automatique de la plupart des appareils photo modernes. Cette vue est également disponible avec les vues mentionnées précédemment, toutes accessibles en appuyant sur un bouton. Cependant, elle n’est pas aussi populaire car une vue à fort grossissement prend plus de temps pour balayer une large zone. Cette vue permet au tireur de mieux viser le missile et de régler le système de guidage logé à l’intérieur du missile. C’est dans cette vue que les informations sont transmises du CLU au système de guidage du missile en passant par l’électronique de connexion de l’ensemble tube de lancement. Si le tireur ne se sent pas à l’aise avec le tir du missile, il peut toujours revenir aux autres vues sans avoir à tirer le missile. Lorsque le tireur est satisfait de l’image de la cible, il appuie sur la deuxième gâchette et établit un « verrouillage ». Le missile est lancé après un court délai.
La CLUEdit légère
L’armée américaine développe une nouvelle CLU comme une amélioration de la version Block I. Le nouveau CLU est 70 pour cent plus petit, 40 pour cent plus léger, et a une durée de vie de la batterie augmentée de 50 pour cent. Les caractéristiques du CLU léger sont les suivantes : un capteur IR à ondes longues ; un écran haute définition avec une résolution améliorée ; des poignées intégrées ; une caméra couleur de cinq mégapixels ; un point laser visible visuellement ou par IR ; un localisateur de cible lointaine utilisant le GPS, un télémètre laser et un capteur de cap ; et une électronique modernisée.
Assemblée du tube de lancementModification
L’artilleur et le porteur de munitions portent tous deux un tube jetable appelé l’assemblée du tube de lancement, qui abrite le missile et le protège des environnements difficiles. Le tube est également doté d’une électronique intégrée et d’un système de charnière de verrouillage qui fait de l’attachement et du détachement du missile à l’unité de lancement du commandement un processus rapide et simple.
MissileEdit
Edit d’ogive
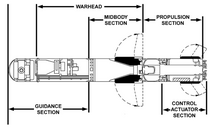

L’ogive tandem du missile Javelin est de type HEAT. Cette munition utilise une charge creuse explosive pour créer un jet de métal déformé de manière superplastique formé de chemises métalliques en forme de trompette. Le résultat est un flux étroit de particules à haute vitesse qui peut pénétrer les blindages.
Le Javelin contrecarre l’arrivée des blindages réactifs explosifs (ERA). Les boîtes ou tuiles ERA reposant sur le blindage principal d’un véhicule explosent lorsqu’elles sont frappées par une ogive. Cette explosion n’endommage pas le blindage principal du véhicule, mais fait voler des panneaux d’acier sur la trajectoire du flux étroit de particules d’un projectile HEAT, ce qui perturbe sa concentration et le rend incapable de couper le blindage principal. Le Javelin utilise deux ogives à charge creuse en tandem. La charge précurseur HEAT, faible et de plus petit diamètre, pousse à travers l’ERA sans la déclencher et y perfore un canal pour l’ogive HEAT de bien plus grand diamètre, qui pénètre alors le blindage principal de la cible.
Un revêtement en molybdène à deux couches est utilisé pour le précurseur et un revêtement en cuivre pour la charge principale.
Pour protéger la charge principale du souffle explosif, du choc et des débris causés par l’impact du nez du missile et la détonation de la charge précurseur, un bouclier anti-souffle est utilisé entre les deux charges. Il s’agit du premier bouclier anti-souffle en matériau composite et du premier qui présente un trou au milieu pour fournir un jet moins diffus.
Un nouveau revêtement de charge principale produit un jet à plus grande vitesse. Tout en rendant l’ogive plus petite, ce changement la rend plus efficace, laissant plus de place au propergol pour le moteur principal de la fusée, et augmentant ainsi la portée du missile.
On utilise un armement et une fusion électroniques, appelés Electronic Safe Arming and Fire (ESAF). Le système ESAF permet au processus de mise à feu et d’armement de se dérouler, tout en imposant une série de contrôles de sécurité au missile. Le système ESAF déclenche le moteur de lancement après l’appui sur la gâchette. Lorsque le missile atteint un point d’accélération clé (indiquant qu’il a franchi le tube de lancement), le système ESAF déclenche un deuxième signal d’armement pour mettre à feu le moteur de vol. Après une autre vérification des conditions du missile (vérification du verrouillage de la cible), l’ESAF lance l’armement final pour permettre la détonation des ogives à l’impact de la cible. Lorsque le missile frappe la cible, l’ESAF active la fonction d’ogive tandem (fournir un temps approprié entre la détonation de la charge précurseur et la détonation de la charge principale).
Bien que l’ogive HEAT tandem du Javelin se soit avérée efficace pour détruire les chars, la plupart des menaces contre lesquelles elle a été employée en Irak et en Afghanistan étaient les équipes et les équipes d’armement, les bâtiments et les véhicules légèrement blindés et non blindés. Afin de rendre le Javelin plus utile dans ces scénarios, le Centre de recherche, de développement et d’ingénierie de l’aviation et des missiles a développé une ogive polyvalente (MPWH) pour le FGM-148F. Bien qu’elle soit toujours mortelle contre les chars, la nouvelle ogive est dotée d’un boîtier d’ogive en acier à fragmentation naturelle qui double l’efficacité contre le personnel grâce à une fragmentation accrue. Le MPWH n’augmente pas le poids ni le coût du missile et son corps intermédiaire en composite est plus léger, ce qui permet de le remplacer par des tubes Javelin existants. Le modèle F du Javelin devrait commencer à être livré au début de 2020 ; la conception améliorée du missile, ainsi que le nouveau CLU plus léger avec un dispositif de suivi de cible amélioré, sont entrés en production en mai 2020.
PropulsionEdit

La plupart des lance-roquettes nécessitent une large zone dégagée derrière le tireur pour éviter les blessures dues au backblast. Pour remédier à cette lacune, sans augmenter le recul à un niveau inacceptable, le système Javelin utilise un mécanisme de lancement souple. Un moteur de lancement utilisant un propergol conventionnel éjecte le missile du lanceur, mais arrête de brûler avant que le missile ne franchisse le tube. Le moteur de vol n’est allumé qu’après un délai permettant à l’opérateur de se dégager suffisamment. Pour gagner du poids, les deux moteurs sont intégrés avec un disque d’éclatement entre eux ; il est conçu pour tolérer la pression du moteur de lancement d’un côté, mais pour se rompre facilement de l’autre lorsque le moteur de vol s’allume. Les moteurs utilisent une tuyère commune, les gaz d’échappement du moteur de vol traversant le moteur de lancement éteint. Comme le boîtier du moteur de lancement reste en place, un allumeur annulaire inhabituel est utilisé pour le faire démarrer. Un allumeur normal serait projeté à l’arrière du missile lors de l’allumage du moteur de vol et pourrait blesser l’opérateur. Comme le moteur de lancement utilise un propergol standard de l’OTAN, la présence de bêta-résorcinol de plomb comme modificateur du taux de combustion entraîne la présence d’une quantité de plomb et d’oxyde de plomb dans les gaz d’échappement ; pour cette raison, on demande aux artilleurs de retenir leur souffle après avoir tiré.
Dans le cas où le moteur de lancement fonctionne mal et où le tube de lancement est en surpression – par exemple, si la fusée se coince – le missile Javelin comprend un système de libération de la pression pour empêcher le lanceur d’exploser. Le moteur de lancement est maintenu en place par un ensemble de goupilles de cisaillement, qui se fracturent si la pression augmente trop et permettent au moteur d’être poussé à l’arrière du tube.
Edition du Seeker
En tant que missile « tire et oublie », après le lancement, le missile doit être capable de suivre et de détruire sa cible sans le tireur. Ceci est réalisé en couplant un système IR d’imagerie embarqué (différent du système d’imagerie du CLU) avec un système de poursuite embarqué.
Le mitrailleur utilise le système IR du CLU pour trouver et identifier la cible puis passe au système IR indépendant du missile pour définir une boîte de poursuite autour de la cible et établir un verrouillage. Le mitrailleur place des crochets autour de l’image pour le verrouillage.
L’autodirecteur reste concentré sur l’image de la cible en continuant à la suivre lorsque la cible se déplace ou que la trajectoire de vol du missile se modifie ou que les angles d’attaque changent. L’autodirecteur comporte trois composants principaux : le réseau plan focal (FPA), le refroidissement et l’étalonnage et la stabilisation.
Réseau plan focal (FPA)Edit
L’ensemble d’autodirecteur est enfermé dans un dôme transparent au rayonnement infrarouge à ondes longues. Le rayonnement IR passe à travers le dôme puis à travers des lentilles qui focalisent l’énergie. L’énergie IR est réfléchie par des miroirs sur l’APF. L’autodirecteur est un FPA à fixation bidimensionnelle composé de 64×64 éléments détecteurs en MerCad (HgCdTe). Le FPA traite les signaux provenant des détecteurs et relaie un signal au tracker du missile.
Le staring array est un dispositif photo-voltaïque où les photons incidents stimulent les électrons et sont stockés, pixel par pixel, dans des circuits intégrés de lecture fixés à l’arrière du détecteur. Ces électrons sont convertis en tensions qui sont multiplexées hors du ROIC sur une base image par image.
Refroidissement/calibrageEdit
Pour fonctionner efficacement, le FPA doit être refroidi et calibré. Dans d’autres applications, les détecteurs IR d’un CLU sont refroidis à l’aide d’une fiole Dewar et d’un moteur Stirling à cycle fermé, mais l’espace est insuffisant dans le missile pour une solution similaire. Avant le lancement, un refroidisseur monté à l’extérieur du tube de lancement active les systèmes électriques du missile et fournit du gaz froid provenant d’un détendeur Joule-Thomson à l’ensemble des détecteurs du missile alors que ce dernier est encore dans le tube de lancement. Lorsque le missile est tiré, cette connexion externe est interrompue et le gaz réfrigérant est fourni en interne par une bouteille de gaz argon embarquée. Le gaz est maintenu dans une petite bouteille à haute pression et contient suffisamment de liquide de refroidissement pour la durée du vol d’environ 19 secondes.
L’autodirecteur est calibré à l’aide d’une roue de chopper. Ce dispositif est un éventail de six lames : cinq lames noires à faible émissivité IR et une lame semi-réfléchissante. Ces lames tournent devant l’optique de l’autodirecteur de manière synchronisée, de sorte que l’APF dispose en permanence de points de référence en plus de la visualisation de la scène. Ces points de référence permettent à la FPA de réduire le bruit introduit par les variations de réponse des éléments du détecteur.
StabilisationEdit
La plate-forme sur laquelle est monté l’autodirecteur doit être stabilisée par rapport au mouvement du corps du missile et l’autodirecteur doit être déplacé pour rester aligné avec la cible. Le système de stabilisation doit faire face aux accélérations rapides, aux mouvements de haut en bas et aux mouvements latéraux. Pour ce faire, il utilise un système de cardan, des accéléromètres, des gyroscopes à masse tournante (ou MEMS) et des moteurs pour entraîner les changements de position de la plate-forme. Le système est essentiellement un pilote automatique. Les informations fournies par les gyroscopes sont transmises à l’électronique de guidage qui entraîne un moteur couple fixé à la plate-forme de l’autodirecteur pour maintenir l’autodirecteur aligné sur la cible. Les fils qui relient l’autodirecteur au reste du missile sont soigneusement conçus pour éviter d’induire un mouvement ou une traînée sur la plateforme de l’autodirecteur.
TrackerEdit

Le tracker est la clé du guidage/contrôle pour une éventuelle frappe. Les signaux de chacun des 4 096 éléments détecteurs (matrice de 64×64 pixels) de l’autodirecteur sont transmis aux circuits intégrés de lecture FPA qui lisent puis créent une trame vidéo qui est envoyée au système de poursuite pour traitement. En comparant les images individuelles, le système de poursuite détermine la nécessité de corriger le tir afin de maintenir le missile sur sa cible. Le système de poursuite doit être capable de déterminer quelle partie de l’image représente la cible. La cible est initialement définie par le tireur, qui place un cadre configurable autour d’elle. Le tracker utilise ensuite des algorithmes pour comparer cette région du cadre, basée sur des données d’image, de géométrie et de mouvement, aux nouvelles images envoyées par l’autodirecteur, à la manière d’algorithmes de reconnaissance de formes. À la fin de chaque image, la référence est mise à jour. Le tracker est capable de garder la trace de la cible même si le point de vue de l’autodirecteur peut changer radicalement au cours du vol.
Pour guider le missile, le tracker localise la cible dans l’image en cours et compare cette position avec le point visé. Si cette position est décentrée, le tracker calcule une correction et la transmet au système de guidage, qui effectue les ajustements appropriés sur les quatre ailerons de queue mobiles, ainsi que sur les huit ailes fixes à mi-corps. Il s’agit d’un pilote automatique. Pour guider le missile, le système dispose de capteurs qui vérifient que les ailerons sont positionnés comme demandé. Si ce n’est pas le cas, l’écart est renvoyé au contrôleur pour un nouvel ajustement. Il s’agit d’un contrôleur en boucle fermée.
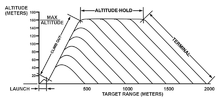
Il y a trois étapes du vol gérées par le tracker : 1) une phase initiale juste après le lancement ; 2) une phase de mi-vol qui dure pendant la majeure partie du vol ; et 3) une phase terminale dans laquelle le tracker sélectionne le point d’impact le plus efficace. Grâce aux algorithmes de guidage, le pilote automatique utilise les données de l’autodirecteur et du tracker pour déterminer quand faire passer le missile d’une phase de vol à une autre. Selon que le missile est en mode d’attaque par le haut ou d’attaque directe, le profil du vol peut changer de manière significative. En mode d’attaque par le haut, le missile doit monter brusquement après le lancement et voler en croisière à haute altitude puis plonger sur le dessus de la cible (balle courbe). En mode d’attaque directe (balle rapide), le missile vole en croisière à une altitude plus basse directement sur la cible. La trajectoire de vol exacte qui tient compte de la portée de la cible est calculée par l’unité de guidage.
.