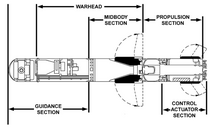
Het systeem bestaat uit drie hoofdcomponenten – de Command Launch Unit, de Launch Tube Assembly en de raket zelf.
Commando Launch UnitEdit

Beeld L-R NFOV, WFOV, daglenzen

De boordschutter draagt een herbruikbare Command Launch Unit (naast de Launch Tube Assembly), beter bekend als een CLU (spreek uit als “clue”) en is de richtcomponent van het uit twee delen bestaande systeem.tweedelige systeem. De CLU heeft drie standpunten die worden gebruikt om de raket te vinden, te richten en af te vuren en kan ook los van de raket worden gebruikt als draagbaar thermisch vizier. Infanteristen hoeven niet langer voortdurend in contact te blijven met gepantserde personeelsdragers en tanks met thermische vizieren. Daardoor is het infanteriepersoneel flexibeler en in staat bedreigingen waar te nemen die het anders niet zou kunnen waarnemen. In 2006 werd een contract toegekend aan Toyon Research Corporation om te beginnen met de ontwikkeling van een upgrade van de CLU die de transmissie van doelbeeld- en GPS-locatiegegevens naar andere eenheden mogelijk maakt.
DagzichtveldEdit
Het eerste zicht is een 4× vergrotend dagzicht. Het wordt voornamelijk gebruikt om gebieden te scannen in zichtbaar licht tijdens daglicht werking. Het wordt ook gebruikt om te scannen na zonsopgang en zonsondergang, wanneer het warmtebeeld moeilijk scherp te stellen is als gevolg van de natuurlijke snelle opwarming en/of afkoeling van de aarde.
WFOV (Wide Field of View)bewerken
Het tweede beeld is het 4× vergroting nachtbeeld, en toont de schutter een thermische weergave van het bekeken gebied. Dit is ook het primaire beeld dat wordt gebruikt vanwege de mogelijkheid om infrarode straling te detecteren en zowel troepen als voertuigen te vinden die anders te goed verborgen zijn om te detecteren. Het scherm toont een “groene schaal” weergave die zowel in contrast als in helderheid kan worden aangepast. De binnenkant van de CLU wordt gekoeld door een kleine koeleenheid die aan het vizier is bevestigd. Dit verhoogt de gevoeligheid van het warmtebeeld aanzienlijk, omdat de temperatuur binnenin het vizier veel lager is dan die van de objecten die worden gedetecteerd. Door deze gevoeligheid kan de schutter de CLU “scherpstellen” om een gedetailleerd beeld te geven van het gebied dat wordt bekeken door temperatuurverschillen van slechts enkele graden. De schutter bedient dit beeld met behulp van twee handstations, vergelijkbaar met de bedieningsknuppel die in moderne cockpits te vinden is. Het is vanuit dit gezichtsveld dat de schutter het beeld focust en het gebied bepaalt dat de beste warmte signatuur geeft waarop de raket kan worden vergrendeld.
NFOV (Narrow Field of View)Edit
Het derde gezichtsveld is een 12× thermisch zicht dat wordt gebruikt om het doelvoertuig beter te identificeren. Zodra de CLU is gericht in WFOV, kan de schutter overschakelen naar NFOV voor doelherkenning voordat de Seeker FOV wordt geactiveerd.
Als het beste doelgebied is gekozen, drukt de schutter op een van de twee triggers en wordt automatisch overgeschakeld naar het vierde gezichtsveld; de Seeker FOV, dat is een 9x vergroting thermisch zicht. Dit proces is vergelijkbaar met de automatische zoomfunctie op de meeste moderne camera’s. Dit beeld is ook beschikbaar samen met de eerder genoemde beelden, die allemaal met een druk op de knop kunnen worden opgeroepen. Het is echter niet zo populair omdat het bij een sterke vergroting langer duurt om een groot gebied te scannen. Met dit zicht kan de schutter de raket verder richten en het geleidingssysteem dat in de raket zelf is ondergebracht, instellen. In dit zicht wordt informatie doorgegeven van de CLU, door de verbindingselektronica van de lanceerbuis en in het geleidingssysteem van de raket. Als de schutter zich ongemakkelijk voelt bij het afvuren van de raket, kan hij nog steeds terugschakelen naar de andere weergaven zonder de raket af te vuren. Wanneer de schutter zich op zijn gemak voelt met het doelbeeld, haalt hij de tweede trekker over en maakt een “lock”. De raket lanceert na een korte vertraging.
Lichtgewicht CLUEdit
Het Amerikaanse leger ontwikkelt een nieuwe CLU als verbetering ten opzichte van de Block I-versie. De nieuwe CLU is 70 procent kleiner, 40 procent lichter, en heeft een 50 procent langere levensduur van de batterij. Kenmerken van de lichtgewicht CLU zijn: een lange-golf IR-sensor; een high-definition display met verbeterde resolutie; geïntegreerde handgrepen; een vijf megapixel kleuren camera; een laserpunt dat zichtbaar of door IR kan worden gezien; een ver doelzoeker met behulp van GPS, een laser afstandsmeter, en een koerssensor; en gemoderniseerde elektronica.
Launch Tube AssemblyEdit
Zowel de schutter als de munitiedrager dragen een wegwerpbuis, genaamd de Launch Tube Assembly, waarin de raket is ondergebracht en die de raket beschermt tegen ruwe omgevingen. De buis heeft ook ingebouwde elektronica en een vergrendeling scharnier systeem dat het vastmaken en losmaken van de raket van en naar de Command Launch Unit een snel en eenvoudig proces maakt.
MissileEdit
WarheadEdit

De tandemkern van de Javelin-raket is van het HEAT-type. Deze ronde maakt gebruik van een explosieve gevormde lading om een stroom van superplastisch vervormd metaal te creëren, gevormd uit trompetvormige metalen voeringen. Het resultaat is een smalle stroom deeltjes met hoge snelheid die pantsers kan doorboren.
De Javelin gaat de komst van explosief reactief pantser (ERA) tegen. ERA-dozen of -tegels die over de hoofdbepantsering van een voertuig liggen, exploderen wanneer ze door een kernkop worden geraakt. Deze explosie schaadt de hoofdbepantsering van het voertuig niet, maar zorgt ervoor dat stalen panelen over het pad van de smalle deeltjesstroom van een HEAT-kogel vliegen, waardoor de focus ervan wordt verstoord en de kogel niet door de hoofdbepantsering kan snijden. De Javelin gebruikt twee gevormde ladingkoppen in tandem. De zwakke voorloperlading met een kleinere diameter duwt door de ERA zonder deze te laten ontploffen, en slaat er een kanaal doorheen voor de HEAT-kernkop met een veel grotere diameter, die vervolgens de primaire bepantsering van het doelwit doorboort.
Een tweelaags molybdeen voering wordt gebruikt voor de precursor en een koperen voering voor de hoofdkernkop.
Om de hoofdlading te beschermen tegen de explosieve ontploffing, de schok en het puin veroorzaakt door de impact van de neus van de raket en de detonatie van de precursor lading, wordt een explosiescherm gebruikt tussen de twee ladingen. Dit was het eerste schild van composietmateriaal en het eerste met een gat door het midden om een minder diffuse straal te krijgen.
Een nieuwere hoofdladingsvoering produceert een straal met hogere snelheid. Terwijl de kernkop kleiner wordt, maakt deze verandering hem effectiever, waardoor er meer ruimte overblijft voor stuwstof voor de hoofdraketmotor, en dus het bereik van de raket wordt vergroot.
Elektronische bewapening en afvuring, genaamd Electronic Safe Arming and Fire (ESAF), wordt gebruikt. Het ESAF-systeem maakt het mogelijk het afvuur- en bewapeningsproces door te laten gaan, terwijl het de raket een reeks veiligheidscontroles oplegt. ESAF geeft een signaal aan de lanceermotor nadat de trekker is overgehaald. Wanneer de raket een belangrijk versnellingspunt bereikt (hetgeen aangeeft dat de raket de lanceerbuis heeft verlaten), geeft de ESAF een tweede signaal om de vluchtmotor te ontsteken. Na nog een controle van de toestand van de raket (target lock check) initieert de ESAF de laatste activering om de kernkoppen tot ontploffing te brengen wanneer het doel wordt geraakt. Wanneer de raket het doel treft, schakelt de ESAF de tandemkernfunctie in (zorgt voor de juiste tijd tussen de detonatie van de precursorlading en de detonatie van de hoofdlading).
Hoewel de Javelin’s tandem HEAT-kernkop efficiënt is gebleken in het vernietigen van tanks, waren de meeste bedreigingen waartegen hij in Irak en Afghanistan werd ingezet, wapenbemanningen en -teams, gebouwen en licht gepantserde en ongepantserde voertuigen. Om de Javelin in deze scenario’s nuttiger te maken, ontwikkelde het Aviation and Missile Research, Development, and Engineering Center een MPWH (multi-purpose warhead) voor de FGM-148F. Hoewel hij nog steeds dodelijk is tegen tanks, heeft de nieuwe kernkop een natuurlijk versplinterende stalen kernkopbehuizing die de doeltreffendheid tegen personeel verdubbelt door de verbeterde versplintering. De MPWH brengt geen extra gewicht of kosten met zich mee en heeft een lichter middendeel van de raket van composietmateriaal, zodat de bestaande Javelin-buizen kunnen worden vervangen. Het Javelin F-model is gepland om te beginnen met leveringen in het begin van 2020; het verbeterde raketontwerp, samen met nieuwe lichtere CLU met een verbeterde doelvolger, is in mei 2020 in productie gegaan.
VoortstuwingEdit

De meeste raketwerpers vereisen een grote vrije ruimte achter de schutter om verwondingen door backblast te voorkomen. Om deze tekortkoming te verhelpen, zonder de terugslag tot een onaanvaardbaar niveau te verhogen, maakt het Javelin-systeem gebruik van een zacht lanceermechanisme. Een lanceermotor met conventionele raketstuwstof werpt de raket uit de lanceerinrichting, maar stopt met branden voordat de raket de buis heeft verlaten. De vluchtmotor wordt pas na enige tijd ontstoken, zodat de operator voldoende afstand kan nemen. Om gewicht te besparen zijn de twee motoren geïntegreerd met een breekplaat ertussen; deze is ontworpen om de druk van de lanceermotor aan één kant te verdragen, maar aan de andere kant gemakkelijk te scheuren wanneer de vluchtmotor ontsteekt. De motoren gebruiken een gemeenschappelijke straalpijp, waarbij de uitlaat van de vluchtmotor door de uitgeputte lanceermotor stroomt. Omdat het omhulsel van de lanceermotor op zijn plaats blijft, wordt een ongebruikelijke ringvormige ontsteker gebruikt om hem te starten; een normale ontsteker zou bij ontsteking van de vluchtmotor uit de achterkant van de raket worden geblazen en zou de bediener kunnen verwonden. Omdat de lanceermotor een standaard NATO stuwstof gebruikt, veroorzaakt de aanwezigheid van lood-bèta-resorcinol als een brandsnelheidsmodificator een hoeveelheid lood en loodoxide in de uitlaat; om deze reden worden schutters gevraagd hun adem in te houden na het afvuren.
In het geval dat de lanceermotor defect raakt en de lanceerbuis overdruk krijgt-bijvoorbeeld als de raket vast komt te zitten- bevat de Javelin raket een drukontlastingssysteem om te voorkomen dat de lanceerinrichting explodeert. De lanceermotor wordt op zijn plaats gehouden door een set breekpennen, die breken als de druk te hoog wordt en de motor uit de achterkant van de buis kunnen duwen.
SeekerEdit
Als een fire-and-forget raket, moet de raket na lancering in staat zijn om zijn doel op te sporen en te vernietigen zonder de schutter. Dit wordt gedaan door het koppelen van een on-board imaging IR systeem (verschillend van CLU imaging systeem) met een on-board tracking systeem.
De schutter gebruikt het CLU’s IR systeem om het doel te vinden en te identificeren en schakelt dan over op het onafhankelijke IR systeem van de raket om een track box rond het doel in te stellen en een lock vast te stellen. De schutter plaatst haakjes rond het beeld voor vergrendeling.
De zoeker blijft gericht op het doelbeeld en blijft het volgen als het doel beweegt of de vliegbaan van de raket verandert of als aanvalshoeken veranderen. De seeker heeft drie hoofdcomponenten: focal plane array (FPA), koeling en kalibratie en stabilisatie.
Focal plane array (FPA)Edit
De seeker-assemblage is gevat in een koepel die transparant is voor langgolvige infraroodstraling. De IR-straling gaat door de koepel en vervolgens door lenzen die de energie focussen. De IR-energie wordt door spiegels weerkaatst op de FPA. De zoeker is een tweedimensionale starende FPA van 64×64 MerCad (HgCdTe) detectorelementen. De FPA verwerkt de signalen van de detectoren en geeft een signaal door aan de tracker van de raket.
De staring array is een foto-voltaïsch apparaat waarbij de invallende fotonen elektronen stimuleren en pixel voor pixel worden opgeslagen in geïntegreerde afleescircuits die aan de achterzijde van de detector zijn bevestigd. Deze elektronen worden omgezet in spanningen die frame-per-frame uit de ROIC worden gemultiplexed.
Koeling/calibratieEdit
Om effectief te functioneren moet de FPA worden gekoeld en gekalibreerd. In andere toepassingen worden de IR-detectoren van een CLU gekoeld met behulp van een Dewar-kolf en een Stirlingmotor met gesloten cyclus, maar er is onvoldoende ruimte in de raket voor een soortgelijke oplossing. Vóór de lancering activeert een koeler aan de buitenkant van de lanceerbuis de elektrische systemen in de raket en levert koud gas van een Joule-Thomson expander aan de raketdetectorassemblage terwijl de raket zich nog in de lanceerbuis bevindt. Wanneer de raket wordt afgevuurd, wordt deze externe verbinding verbroken en wordt intern koelgas geleverd door een argongasfles aan boord. Het gas wordt in een kleine fles onder hoge druk gehouden en bevat voldoende koelvloeistof voor de duur van de vlucht van ongeveer 19 seconden.
De zoeker wordt gekalibreerd met behulp van een chopperwiel. Dit apparaat is een waaier van zes bladen: vijf zwarte bladen met een lage IR-emissiviteit en één semi-reflecterend blad. Deze bladen draaien synchroon voor de zoekeroptiek, zodat de FPA voortdurend referentiepunten krijgt, naast het zicht op de scène. Deze referentiepunten stellen de FPA in staat de ruis te verminderen die wordt geïntroduceerd door responsvariaties in de detectorelementen.
StabilisatieEdit
Het platform waarop de seeker is gemonteerd moet worden gestabiliseerd ten opzichte van de beweging van het raketlichaam en de seeker moet worden bewogen om uitgelijnd te blijven met het doel. Het stabilisatiesysteem moet bestand zijn tegen snelle versnellingen, op- en neerwaartse en zijwaartse bewegingen. Dit wordt gedaan door een gimbal-systeem, versnellingsmeters, spinning-mass gyroscopen (of MEMS), en motoren om veranderingen in de positie van het platform aan te drijven. Het systeem is in feite een automatische piloot. De informatie van de gyroscopen wordt doorgegeven aan de geleidingselektronica, die een koppelmotor aandrijft die aan het zoekerplatform is bevestigd om de zoeker op het doel gericht te houden. De draden die de zoeker met de rest van de raket verbinden zijn zorgvuldig ontworpen om beweging of weerstand op het zoekerplatform te voorkomen.
TrackerEdit

De tracker is de sleutel tot geleiding/besturing voor een uiteindelijke treffer. De signalen van elk van de 4.096 detectorelementen (array van 64×64 pixels) in de zoeker worden doorgegeven aan de geïntegreerde FPA-leesschakelingen die vervolgens een videoframe maken dat naar het trackersysteem wordt gestuurd voor verwerking. Door de afzonderlijke frames te vergelijken, bepaalt de tracker de noodzaak van correctie om de raket op het doel te houden. De tracker moet kunnen bepalen welk deel van het beeld het doel voorstelt. Het doel wordt in eerste instantie bepaald door de schutter, die er een configureerbaar kader omheen plaatst. De tracker gebruikt dan algoritmen om dat deel van het frame op basis van beeld-, geometrische en bewegingsgegevens te vergelijken met de nieuwe beeldframes die door de zoeker worden verzonden, vergelijkbaar met patroonherkenningsalgoritmen. Aan het einde van elk frame wordt de referentie bijgewerkt. De tracker is in staat het doel te volgen, ook al kan het gezichtspunt van de zoeker tijdens de vlucht radicaal veranderen.
Om de raket te geleiden, lokaliseert de tracker het doel in het huidige frame en vergelijkt deze positie met het richtpunt. Als deze positie niet in het midden ligt, berekent de tracker een correctie en geeft die door aan het geleidingssysteem, dat de nodige aanpassingen maakt aan de vier beweegbare staartvinnen, alsmede aan de acht vaste vleugels in het midden van het lichaam. Dit is een automatische piloot. Om de raket te geleiden heeft het systeem sensoren die controleren of de vinnen zijn geplaatst zoals gevraagd. Zo niet, dan wordt de afwijking teruggestuurd naar de controller voor verdere aanpassing.
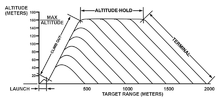
Er zijn drie fasen in de vlucht die door de tracker worden gestuurd: 1) een beginfase vlak na de lancering; 2) een fase halverwege de vlucht die het grootste deel van de vlucht duurt; en 3) een eindfase waarin de tracker het meest effectieve punt van inslag selecteert. Met geleidingsalgoritmen gebruikt de automatische piloot gegevens van de zoeker en de tracker om te bepalen wanneer de raket van de ene vluchtfase naar de andere moet overgaan. Afhankelijk van de vraag of de raket in de topaanvalsmodus of in de directe aanvalsmodus staat, kan het profiel van de vlucht aanzienlijk veranderen. In de topaanvalsmodus moet de raket na de lancering sterk klimmen en op grote hoogte vliegen en vervolgens op de top van het doel duiken (curveball). In de directe aanvalsmodus (fastball) vliegt de raket op lagere hoogte rechtstreeks op het doel af. De exacte vliegroute, waarbij rekening wordt gehouden met de afstand tot het doel, wordt berekend door de geleidingseenheid.