El sistema consta de tres componentes principales: la Unidad de Lanzamiento de Mando, el Conjunto de Tubo de Lanzamiento y el propio misil.
Unidad de Lanzamiento de MandoEditar

Imagen L-R NFOV, WFOV, lentes diurnas

El artillero lleva una Unidad de Lanzamiento de Mando reutilizable (además del Conjunto de Tubo de Lanzamiento) más comúnmente conocida como CLU (pronunciado «pista») y es el componente de puntería del sistema de dosde dos partes. La CLU tiene tres vistas que se utilizan para encontrar, apuntar y disparar el misil y también puede utilizarse por separado del misil como mira térmica portátil. La infantería ya no tiene que estar en contacto permanente con los vehículos blindados de transporte de personal y los tanques con miras térmicas. Esto hace que el personal de infantería sea más flexible y capaz de percibir amenazas que de otro modo no podrían detectar. En 2006, se adjudicó un contrato a Toyon Research Corporation para que iniciara el desarrollo de una actualización de la CLU que permitiera la transmisión de imágenes de objetivos y datos de localización GPS a otras unidades.
Campo de visión diurnaEditar
La primera vista es una vista diurna de 4× aumentos. Se utiliza principalmente para escanear áreas con luz visible durante el funcionamiento diurno. También se utiliza para escanear después del amanecer y el atardecer, cuando la imagen térmica es difícil de enfocar debido al rápido calentamiento y/o enfriamiento natural de la Tierra.
WFOV (Wide Field of View)Edit
La segunda vista es la vista nocturna de 4× aumentos, y muestra al artillero una representación térmica del área vista. Esta es también la vista principal utilizada debido a su capacidad para detectar la radiación infrarroja y encontrar tanto las tropas como los vehículos que de otro modo estarían demasiado bien ocultos para ser detectados. La pantalla muestra una vista de «escala verde» que puede ajustarse tanto en contraste como en brillo. El interior de la CLU se refrigera mediante una pequeña unidad de refrigeración acoplada a la mira. Esto aumenta en gran medida la sensibilidad de la capacidad de imagen térmica, ya que la temperatura en el interior de la mira es mucho más baja que la de los objetos que detecta. Debido a la sensibilidad que esto provoca, el artillero es capaz de «enfocar» la CLU para mostrar una imagen detallada de la zona que se está viendo mostrando diferencias de temperatura de sólo unos pocos grados. El artillero maneja esta vista con el uso de dos estaciones de mano similares a la palanca de control que se encuentra en las cabinas modernas. Es a partir de esta vista que el artillero enfoca la imagen y determina el área que da la mejor firma de calor en la que bloquear el misil.
NFOV (Narrow Field of View)Edit
El tercer campo de visión es una mira térmica de 12× utilizada para identificar mejor el vehículo objetivo. Una vez que la CLU ha sido enfocada en WFOV, el artillero puede cambiar a NFOV para el reconocimiento del objetivo antes de activar Seeker FOV.
Una vez elegida la mejor zona del objetivo, el artillero presiona uno de los dos gatillos y se cambia automáticamente a la cuarta vista; el Seeker FOV, que es una vista térmica de 9 aumentos. Este proceso es similar a la función de zoom automático de la mayoría de las cámaras modernas. Esta vista también está disponible junto con las vistas mencionadas anteriormente, a las que se puede acceder pulsando un botón. Sin embargo, no es tan popular, ya que una vista de gran aumento tarda más en escanear una zona amplia. Esta vista permite al artillero apuntar aún más el misil y ajustar el sistema de guía alojado en el interior del misil real. Es cuando en esta vista se pasa la información desde la CLU, a través de la electrónica de conexión del conjunto del tubo de lanzamiento, y al sistema de guiado del misil. Si el artillero se siente incómodo con el disparo del misil, puede volver a las otras vistas sin tener que disparar el misil. Cuando el artillero se siente cómodo con la imagen del objetivo, aprieta el segundo gatillo y establece un «bloqueo». El misil se lanza después de un breve retraso.
Ligero CLUEdit
El Ejército de los Estados Unidos está desarrollando un nuevo CLU como mejora de la versión Block I. El nuevo CLU es un 70 por ciento más pequeño, un 40 por ciento más ligero y tiene un 50 por ciento más de duración de la batería. Las características del CLU ligero son: un sensor de infrarrojos de onda larga; una pantalla de alta definición con resolución mejorada; asas de mano integradas; una cámara en color de cinco megapíxeles; un punto láser que puede verse de forma visible o a través de infrarrojos; un localizador de objetivos lejanos que utiliza GPS, un telémetro láser y un sensor de rumbo; y una electrónica modernizada.
Conjunto de Tubo de LanzamientoEditar
Tanto el artillero como el portador de la munición llevan un tubo desechable llamado Conjunto de Tubo de Lanzamiento, que aloja el misil y lo protege de ambientes adversos. El tubo también lleva incorporada la electrónica y un sistema de bisagras de bloqueo que hace que el acoplamiento y desacoplamiento del misil a la Unidad de Lanzamiento de Mando sea un proceso rápido y sencillo.
MisilEdit
WarheadEdit
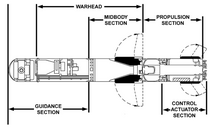

La ojiva tándem del misil Javelin es del tipo HEAT. Esta ronda utiliza una carga explosiva en forma para crear una corriente de metal superplásticamente deformada formada por revestimientos metálicos en forma de trompeta. El resultado es un estrecho chorro de partículas de alta velocidad que puede penetrar el blindaje.
La Javelin contrarresta la llegada del blindaje reactivo explosivo (ERA). Las cajas o baldosas ERA que se encuentran sobre el blindaje principal de un vehículo explotan cuando son alcanzadas por una ojiva. Esta explosión no daña el blindaje principal del vehículo, pero hace que los paneles de acero vuelen a través de la trayectoria de la estrecha corriente de partículas de un proyectil HEAT, interrumpiendo su enfoque y dejándolo incapaz de cortar el blindaje principal. La Javelin utiliza dos ojivas de carga hueca en tándem. La débil carga precursora HEAT de menor diámetro empuja a través del ERA sin activarlo, y perfora un canal a través de él para la ojiva HEAT de diámetro mucho mayor, que entonces penetra el blindaje primario del objetivo.
Se utiliza un revestimiento de molibdeno de dos capas para el precursor y un revestimiento de cobre para la ojiva principal.
Para proteger la carga principal de la explosión, el choque y los escombros causados por el impacto de la nariz del misil y la detonación de la carga precursora, se utiliza un escudo antiexplosión entre las dos cargas. Este fue el primer escudo antiexplosivo de material compuesto y el primero que tenía un agujero en el centro para proporcionar un chorro menos difuso.
Un nuevo revestimiento de la carga principal produce un chorro de mayor velocidad. Aunque hace que la ojiva sea más pequeña, este cambio la hace más eficaz, dejando más espacio para el propulsor del motor principal del cohete, y aumentando así el alcance del misil.
Se utiliza el armado y la fusión electrónicos, llamados Electronic Safe Arming and Fire (ESAF). El sistema ESAF permite el proceso de disparo y armado, al tiempo que impone una serie de controles de seguridad al misil. El sistema ESAF pone en marcha el motor de lanzamiento después de apretar el gatillo. Cuando el misil alcanza un punto de aceleración clave (que indica que ha salido del tubo de lanzamiento), el ESAF inicia una segunda señal de armado para disparar el motor de vuelo. Después de otra comprobación de las condiciones del misil (comprobación de fijación del objetivo), el ESAF inicia el armado final para habilitar las cabezas de combate para su detonación al impactar con el objetivo. Cuando el misil impacta contra el objetivo, el ESAF habilita la función de ojiva tándem (proporciona el tiempo adecuado entre la detonación de la carga precursora y la detonación de la carga principal).
Aunque la ojiva HEAT tándem de la Javelin ha demostrado su eficacia en la destrucción de tanques, la mayoría de las amenazas contra las que se empleó en Irak y Afganistán fueron equipos y tripulaciones de armas, edificios y vehículos ligeramente blindados y no blindados. Para que el Javelin sea más útil en estos escenarios, el Centro de Investigación, Desarrollo e Ingeniería de Aviación y Misiles desarrolló una ojiva multipropósito (MPWH) para el FGM-148F. Aunque sigue siendo letal contra los tanques, la nueva ojiva tiene una carcasa de acero de fragmentación natural que duplica la eficacia contra el personal debido a la fragmentación mejorada. El MPWH no añade peso ni coste y tiene un cuerpo central de misil más ligero para permitir la sustitución de los tubos Javelin existentes. Está previsto que el modelo F de Javelin comience a entregarse a principios de 2020; el diseño mejorado del misil, junto con el nuevo CLU más ligero con un rastreador de objetivos mejorado, entró en producción en mayo de 2020.
PropulsiónEdit

La mayoría de los lanzadores de cohetes requieren una gran área libre detrás del artillero para evitar lesiones por la explosión trasera. Para resolver esta deficiencia, sin aumentar el retroceso a un nivel inaceptable, el sistema Javelin utiliza un mecanismo de lanzamiento suave. Un motor de lanzamiento que utiliza un cohete propulsor convencional expulsa el misil del lanzador, pero deja de arder antes de que el misil salga del tubo. El motor de vuelo se enciende sólo después de un retardo para permitir un despeje suficiente del operador. Para ahorrar peso, los dos motores están integrados con un disco de ruptura entre ellos; está diseñado para tolerar la presión del motor de lanzamiento por un lado, pero para romperse fácilmente por el otro cuando se enciende el motor de vuelo. Los motores utilizan una boquilla común, y el escape del motor de vuelo fluye a través del motor de lanzamiento gastado. Dado que la carcasa del motor de lanzamiento permanece en su lugar, se utiliza un inusual encendedor anular (en forma de anillo) para arrancarlo; un encendedor normal saldría despedido por la parte trasera del misil cuando el motor de vuelo se encendiera y podría herir al operador. Dado que el motor de lanzamiento utiliza un propulsor estándar de la OTAN, la presencia de beta-resorcinol de plomo como modificador de la velocidad de combustión hace que haya una cantidad de plomo y óxido de plomo en el escape; por esta razón, se pide a los artilleros que contengan la respiración después de disparar.
En caso de que el motor de lanzamiento funcione mal y el tubo de lanzamiento esté sobrepresurizado -por ejemplo, si el cohete se atasca- el misil Javelin incluye un sistema de liberación de presión para evitar que el lanzador explote. El motor de lanzamiento se mantiene en su lugar mediante un conjunto de pasadores de cizallamiento, que se fracturan si la presión aumenta demasiado y permiten que el motor sea empujado hacia la parte posterior del tubo.
SeekerEdit
Como misil de disparar y olvidar, después del lanzamiento el misil tiene que ser capaz de rastrear y destruir su objetivo sin el artillero. Esto se hace acoplando un sistema IR de imágenes a bordo (diferente del sistema de imágenes de la CLU) con un sistema de seguimiento a bordo.
El artillero utiliza el sistema IR de la CLU para encontrar e identificar el objetivo y luego cambia al sistema IR independiente del misil para establecer una caja de seguimiento alrededor del objetivo y establecer un bloqueo. El artillero coloca corchetes alrededor de la imagen para el bloqueo.
El buscador se mantiene enfocado en la imagen del objetivo continuando su seguimiento a medida que el objetivo se mueve o la trayectoria de vuelo del misil se altera o cuando los ángulos de ataque cambian. El seeker tiene tres componentes principales: array de plano focal (FPA), refrigeración y calibración y estabilización.
Array de plano focal (FPA)
El conjunto del buscador está encerrado en una cúpula que es transparente a la radiación infrarroja de onda larga. La radiación infrarroja pasa a través de la cúpula y luego a través de lentes que enfocan la energía. La energía IR es reflejada por espejos en el FPA. El buscador es un FPA bidimensional de 64×64 elementos detectores MerCad (HgCdTe). El FPA procesa las señales de los detectores y transmite una señal al rastreador del misil.
El staring array es un dispositivo fotovoltaico en el que los fotones incidentes estimulan los electrones y se almacenan, píxel a píxel, en circuitos integrados de lectura fijados en la parte trasera del detector. Estos electrones se convierten en tensiones que se multiplexan fuera del ROIC cuadro a cuadro.
Enfriamiento/calibraciónEdit
Para funcionar eficazmente, el FPA debe ser enfriado y calibrado. En otras aplicaciones, los detectores de infrarrojos de una CLU se refrigeran utilizando un matraz Dewar y un motor Stirling de ciclo cerrado, pero en el misil no hay espacio suficiente para una solución similar. Antes del lanzamiento, un refrigerador montado en el exterior del tubo de lanzamiento activa los sistemas eléctricos del misil y suministra gas frío desde un expansor Joule-Thomson al conjunto de detectores del misil mientras éste aún está en el tubo de lanzamiento. Cuando se dispara el misil, esta conexión externa se rompe y el gas refrigerante se suministra internamente mediante una botella de gas argón a bordo. El gas se mantiene en una pequeña botella a alta presión y contiene suficiente refrigerante para la duración del vuelo de aproximadamente 19 segundos.
El buscador se calibra utilizando una rueda de corte. Este dispositivo es un abanico de seis aspas: cinco aspas negras de baja emisividad IR y una semi-reflectante. Estas palas giran delante de la óptica del buscador de forma sincronizada, de manera que el FPA dispone continuamente de puntos de referencia además de ver la escena. Estos puntos de referencia permiten al FPA reducir el ruido introducido por las variaciones de respuesta en los elementos detectores.
EstabilizaciónEditar
La plataforma sobre la que se monta el seeker debe estabilizarse con respecto al movimiento del cuerpo del misil y el seeker debe moverse para mantenerse alineado con el objetivo. El sistema de estabilización debe hacer frente a la aceleración rápida, a los movimientos ascendentes y descendentes y a los movimientos laterales. De ello se encargan un sistema de cardán, acelerómetros, giroscopios de masa giratoria (o MEMS) y motores para impulsar los cambios de posición de la plataforma. El sistema es básicamente un piloto automático. La información de los giroscopios se transmite a la electrónica de guiado, que acciona un motor de torsión unido a la plataforma del buscador para mantenerlo alineado con el objetivo. Los cables que conectan el buscador con el resto del misil están cuidadosamente diseñados para evitar inducir movimiento o arrastre en la plataforma del buscador.
TrackerEdit

El rastreador es clave para el guiado/control para un eventual impacto. Las señales de cada uno de los 4.096 elementos detectores (matriz de 64×64 píxeles) del buscador pasan a los circuitos integrados de lectura del FPA, que al leerlos crean un cuadro de vídeo que se envía al sistema de seguimiento para su procesamiento. Comparando los fotogramas individuales, el rastreador determina la necesidad de corregir para mantener el misil en el objetivo. El rastreador debe ser capaz de determinar qué parte de la imagen representa el objetivo. El objetivo es definido inicialmente por el artillero, que coloca un marco configurable a su alrededor. A continuación, el rastreador utiliza algoritmos para comparar esa región del marco basándose en datos de imagen, geométricos y de movimiento con los nuevos marcos de imagen que se envían desde el buscador, de forma similar a los algoritmos de reconocimiento de patrones. Al final de cada fotograma, se actualiza la referencia. El rastreador es capaz de mantener la pista del objetivo aunque el punto de vista del buscador pueda cambiar radicalmente en el curso del vuelo.
Para guiar el misil, el rastreador localiza el objetivo en el fotograma actual y compara esta posición con el punto de mira. Si esta posición está descentrada, el rastreador calcula una corrección y la transmite al sistema de guiado, que realiza los ajustes pertinentes en las cuatro aletas de cola móviles, así como en las ocho alas fijas situadas en la parte central del cuerpo. Se trata de un piloto automático. Para guiar el misil, el sistema dispone de sensores que comprueban que las aletas están colocadas según lo solicitado. Si no es así, la desviación se envía de nuevo al controlador para que realice nuevos ajustes. Se trata de un controlador de bucle cerrado.
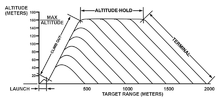
Hay tres fases en el vuelo gestionadas por el rastreador: 1) una fase inicial justo después del lanzamiento; 2) una fase de vuelo medio que dura la mayor parte del vuelo; y 3) una fase terminal en la que el rastreador selecciona el punto de impacto más efectivo. Con los algoritmos de guiado, el piloto automático utiliza los datos del buscador y del rastreador para determinar cuándo debe pasar el misil de una fase de vuelo a otra. Dependiendo de si el misil está en modo de ataque superior o directo, el perfil del vuelo puede cambiar significativamente. El modo de ataque superior requiere que el misil ascienda bruscamente tras el lanzamiento y realice un crucero a gran altura para luego caer en picado sobre la parte superior del objetivo (bola curva). En el modo de ataque directo (bola rápida), el misil navega a una altitud menor directamente hacia el objetivo. La unidad de guiado calcula la trayectoria de vuelo exacta, teniendo en cuenta la distancia al objetivo.