Das System besteht aus drei Hauptkomponenten – der Command Launch Unit, der Launch Tube Assembly und der Rakete selbst.
Command Launch UnitEdit

Bild L-R NFOV, WFOV, Tageslinsen

Der Richtschütze trägt eine wiederverwendbare Command Launch Unit (zusätzlich zur Launch Tube Assembly), besser bekannt als CLU (ausgesprochen „clue“), und ist die Zielkomponente des zweiteiligenteiligen Systems. Die CLU hat drei Ansichten, die zum Finden, Zielen und Abfeuern des Flugkörpers verwendet werden und kann auch separat vom Flugkörper als tragbares Wärmebildgerät verwendet werden. Die Infanterie muss nicht mehr ständig in Kontakt mit Schützenpanzern und Panzern mit Wärmebildgeräten bleiben. Das macht die Infanteristen flexibler und in der Lage, Bedrohungen wahrzunehmen, die sie sonst nicht erkennen könnten. Im Jahr 2006 wurde ein Auftrag an die Toyon Research Corporation vergeben, um mit der Entwicklung eines Upgrades für die CLU zu beginnen, das die Übertragung von Zielbild- und GPS-Standortdaten an andere Einheiten ermöglicht.
Tagessichtfeld
Die erste Sicht ist eine Tagessicht mit 4facher Vergrößerung. Sie wird hauptsächlich zum Scannen von Bereichen im sichtbaren Licht bei Tageslichtbetrieb verwendet. Sie wird auch zum Scannen nach Sonnenaufgang und Sonnenuntergang verwendet, wenn das Wärmebild aufgrund der natürlichen schnellen Erwärmung bzw. Abkühlung der Erde schwer zu fokussieren ist.
WFOV (Wide Field of View)Bearbeiten
Die zweite Ansicht ist die Nachtansicht mit 4facher Vergrößerung und zeigt dem Schützen eine thermische Darstellung des betrachteten Bereichs. Dies ist auch die primäre Ansicht, die aufgrund ihrer Fähigkeit, Infrarotstrahlung zu erkennen und sowohl Truppen als auch Fahrzeuge zu finden, die sonst zu gut versteckt sind, um sie zu erkennen, verwendet wird. Der Bildschirm zeigt eine „grüne Skala“-Ansicht, die sowohl in Kontrast als auch in Helligkeit eingestellt werden kann. Das Innere des CLU wird durch eine kleine, am Visier angebrachte Kühleinheit gekühlt. Dadurch wird die Empfindlichkeit der Wärmebildfunktion stark erhöht, da die Temperatur im Inneren des Visiers viel niedriger ist als die der Objekte, die es erkennt. Aufgrund der dadurch bedingten Empfindlichkeit ist der Richtschütze in der Lage, die CLU so zu „fokussieren“, dass ein detailliertes Bild des betrachteten Bereichs mit Temperaturunterschieden von nur wenigen Grad angezeigt wird. Der Richtschütze bedient diese Ansicht mit Hilfe von zwei Handstationen, ähnlich dem Steuerknüppel in modernen Cockpits. Von dieser Ansicht aus fokussiert der Richtschütze das Bild und bestimmt den Bereich mit der besten Wärmesignatur, auf den die Rakete gerichtet werden soll.
NFOV (Narrow Field of View)
Das dritte Sichtfeld ist ein 12×-Wärmebild, das zur besseren Identifizierung des Zielfahrzeugs verwendet wird. Nachdem die CLU im WFOV fokussiert wurde, kann der Richtschütze zur Zielerkennung auf das NFOV umschalten, bevor er das Seeker FOV aktiviert.
Wenn der beste Zielbereich ausgewählt ist, drückt der Richtschütze einen der beiden Auslöser und wird automatisch auf das vierte Sichtfeld umgeschaltet; das Seeker FOV, das eine 9-fache Vergrößerung der Thermalsicht darstellt. Dieser Vorgang ist vergleichbar mit der automatischen Zoomfunktion der meisten modernen Kameras. Diese Ansicht ist auch zusammen mit den zuvor erwähnten Ansichten verfügbar, die alle mit einem Tastendruck aufgerufen werden können. Sie ist jedoch nicht so beliebt, da eine Ansicht mit hoher Vergrößerung länger braucht, um einen großen Bereich zu scannen. In dieser Ansicht kann der Schütze die Rakete weiter ausrichten und das Lenksystem, das sich in der eigentlichen Rakete befindet, einstellen. In dieser Ansicht werden die Informationen von der CLU über die Verbindungselektronik der Launch Tube Assembly in das Lenksystem des Flugkörpers übertragen. Wenn der Richtschütze sich mit dem Abfeuern der Rakete unwohl fühlt, kann er immer noch zu den anderen Ansichten zurückschalten, ohne die Rakete abfeuern zu müssen. Wenn der Richtschütze mit dem Zielbild zufrieden ist, drückt er den zweiten Abzug und stellt eine „Verriegelung“ her. Die Rakete startet nach einer kurzen Verzögerung.
Leichtgewicht CLUEdit
Die US-Armee entwickelt eine neue CLU als Verbesserung gegenüber der Block-I-Version. Die neue CLU ist 70 Prozent kleiner, 40 Prozent leichter und hat eine um 50 Prozent längere Batterielebensdauer. Zu den Merkmalen der leichten CLU gehören: ein langwelliger IR-Sensor, ein hochauflösendes Display mit verbesserter Auflösung, integrierte Handgriffe, eine Fünf-Megapixel-Farbkamera, ein Laserpunkt, der sichtbar oder durch IR sichtbar ist, ein Fernzielsucher mit GPS, ein Laser-Entfernungsmesser und ein Kurs-Sensor sowie eine modernisierte Elektronik.
Launch Tube AssemblyEdit
Sowohl der Richtschütze als auch der Munitionsträger tragen eine Einwegröhre, die sogenannte Launch Tube Assembly, in der der Flugkörper untergebracht ist und die den Flugkörper vor rauen Umgebungsbedingungen schützt. Die Röhre hat auch eine eingebaute Elektronik und ein verriegelbares Scharniersystem, das das Anbringen und Abnehmen des Flugkörpers an und von der Command Launch Unit zu einem schnellen und einfachen Prozess macht.
MissileEdit
WarheadEdit
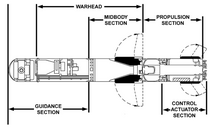

Der Tandemsprengkopf der Javelin-Rakete ist ein HEAT-Typ. Dieses Geschoss nutzt eine explosive Hohlladung, um einen Strom aus superplastisch verformtem Metall zu erzeugen, der aus trompetenförmigen Metalllinern besteht. Das Ergebnis ist ein schmaler Hochgeschwindigkeits-Partikelstrom, der Panzerungen durchdringen kann.
Die Javelin wirkt dem Aufkommen explosiv-reaktiver Panzerungen (ERA) entgegen. ERA-Boxen oder -Kacheln, die über der Hauptpanzerung eines Fahrzeugs liegen, explodieren, wenn sie von einem Sprengkopf getroffen werden. Diese Explosion beschädigt nicht die Hauptpanzerung des Fahrzeugs, sondern führt dazu, dass Stahlplatten quer durch den Weg des schmalen Partikelstroms eines HEAT-Geschosses fliegen, wodurch dessen Fokus gestört wird und er die Hauptpanzerung nicht mehr durchschlagen kann. Die Javelin verwendet zwei Hohlladungsgefechtsköpfe im Tandem. Die schwache HEAT-Vorläufersprengladung mit kleinerem Durchmesser durchschlägt die ERA, ohne sie auszulösen, und schlägt einen Kanal für den HEAT-Gefechtskopf mit viel größerem Durchmesser, der dann die Hauptpanzerung des Ziels durchdringt.
Ein zweischichtiger Molybdän-Liner wird für die Vorläuferladung und ein Kupfer-Liner für den Hauptsprengkopf verwendet.
Um die Hauptladung vor der explosiven Druckwelle, dem Schock und den Trümmern zu schützen, die durch den Aufprall der Raketenspitze und die Detonation der Vorläuferladung verursacht werden, wird ein Sprengschild zwischen den beiden Ladungen verwendet. Dies war der erste Blastschild aus Verbundmaterial und der erste, der ein Loch in der Mitte hatte, um einen weniger diffusen Strahl zu erzeugen.
Eine neuere Hauptladungsauskleidung erzeugt einen Strahl mit höherer Geschwindigkeit. Diese Änderung macht den Gefechtskopf zwar kleiner, aber effektiver und lässt mehr Platz für den Treibstoff des Hauptraketenmotors, wodurch die Reichweite der Rakete erhöht wird.
Elektronische Bewaffnung und Zündung, genannt Electronic Safe Arming and Fire (ESAF), wird verwendet. Das ESAF-System ermöglicht den Abschuss- und Scharfmachungsprozess, während es eine Reihe von Sicherheitsprüfungen an der Rakete vornimmt. ESAF steuert den Startmotor, nachdem der Abzug betätigt wurde. Wenn der Flugkörper einen wichtigen Beschleunigungspunkt erreicht (der anzeigt, dass er das Startrohr verlassen hat), löst das ESAF-System ein zweites Schärfungssignal aus, um den Flugmotor zu zünden. Nach einer weiteren Überprüfung der Raketenbedingungen (Target Lock Check) leitet die ESAF die endgültige Scharfschaltung ein, um die Sprengköpfe für die Detonation beim Auftreffen auf das Ziel zu aktivieren. Wenn die Rakete das Ziel trifft, aktiviert ESAF die Tandem-Gefechtskopffunktion (sorgt für eine angemessene Zeitspanne zwischen der Detonation der Vorläuferladung und der Detonation der Hauptladung).
Obwohl sich der Tandem-HEAT-Gefechtskopf der Javelin als effizient bei der Zerstörung von Panzern erwiesen hat, waren die meisten Bedrohungen, gegen die sie im Irak und in Afghanistan eingesetzt wurde, Waffenbesatzungen und -teams, Gebäude sowie leicht gepanzerte und ungepanzerte Fahrzeuge. Um die Javelin in diesen Szenarien nützlicher zu machen, entwickelte das Aviation and Missile Research, Development, and Engineering Center einen Mehrzwecksprengkopf (MPWH) für die FGM-148F. Der neue Gefechtskopf ist zwar immer noch tödlich gegen Panzer, verfügt aber über ein natürlich zersplitterndes Stahlgefechtskopfgehäuse, das die Wirksamkeit gegen Personen durch die verstärkte Fragmentierung verdoppelt. Der MPWH verursacht kein zusätzliches Gewicht und keine zusätzlichen Kosten und verfügt über einen leichteren Verbundwerkstoff-Raketenkörper, der einen Drop-in-Austausch gegen bestehende Javelin-Rohre ermöglicht. Die Auslieferung des Javelin F-Modells soll Anfang 2020 beginnen; das verbesserte Raketendesign, zusammen mit der neuen, leichteren CLU mit verbessertem Zielsuchgerät, ging im Mai 2020 in Produktion.
Antrieb

Die meisten Raketenwerfer benötigen einen großen freien Bereich hinter dem Schützen, um Verletzungen durch Rückstoß zu vermeiden. Um dieses Manko zu beheben, ohne den Rückstoß auf ein inakzeptables Maß zu erhöhen, verwendet das Javelin-System einen weichen Abschussmechanismus. Ein Startmotor mit konventionellem Raketentreibstoff stößt den Flugkörper aus der Abschussvorrichtung aus, hört aber auf zu brennen, bevor der Flugkörper das Rohr verlässt. Der Flugmotor wird erst nach einer Verzögerung gezündet, um einen ausreichenden Abstand zum Bediener zu ermöglichen. Um Gewicht zu sparen, sind die beiden Motoren mit einer Berstscheibe zwischen ihnen integriert; sie ist so konstruiert, dass sie den Druck des Startmotors von einer Seite aus verträgt, aber von der anderen Seite leicht bricht, wenn der Flugmotor zündet. Die Motoren verwenden eine gemeinsame Düse, wobei die Abgase des Flugmotors durch den verbrauchten Startmotor strömen. Da das Gehäuse des Startmotors an Ort und Stelle verbleibt, wird ein ungewöhnlicher ringförmiger Zünder verwendet, um ihn zu starten; ein normaler Zünder würde bei der Zündung des Flugmotors hinten aus der Rakete herausgeschleudert werden und den Bediener verletzen können. Da der Startmotor einen Standard-NATO-Treibstoff verwendet, verursacht das Vorhandensein von Blei-Beta-Resorcin als Modifikator für die Verbrennungsrate eine gewisse Menge an Blei und Bleioxid in den Abgasen; aus diesem Grund werden die Schützen gebeten, nach dem Abfeuern den Atem anzuhalten.
Für den Fall, dass der Startmotor eine Fehlfunktion hat und das Startrohr unter Überdruck steht – zum Beispiel, wenn die Rakete stecken bleibt – enthält die Javelin-Rakete ein Druckentlastungssystem, um eine Explosion der Rakete zu verhindern. Der Startmotor wird durch eine Reihe von Scherstiften in Position gehalten, die brechen, wenn der Druck zu hoch ansteigt und es dem Motor ermöglichen, hinten aus dem Rohr herausgeschoben zu werden.
SeekerEdit
Als Fire-and-Forget-Rakete muss die Rakete nach dem Start in der Lage sein, ihr Ziel ohne den Schützen zu verfolgen und zu zerstören. Der Richtschütze verwendet das IR-System der CLU, um das Ziel zu finden und zu identifizieren, und schaltet dann auf das unabhängige IR-System des Flugkörpers um, um eine Trackbox um das Ziel herum zu setzen und es zu erfassen. Der Richtschütze platziert Klammern um das Bild für die Verriegelung.
Der Sucher bleibt auf das Bild des Ziels fokussiert und verfolgt es weiter, wenn sich das Ziel bewegt oder die Flugbahn des Flugkörpers sich ändert oder wenn sich der Angriffswinkel ändert. Der Sucher hat drei Hauptkomponenten: Focal-Plane-Array (FPA), Kühlung und Kalibrierung und Stabilisierung.
Focal-Plane-Array (FPA)
Die Sucheranordnung ist von einer Kuppel umschlossen, die für langwellige Infrarotstrahlung transparent ist. Die IR-Strahlung durchläuft die Kuppel und dann Linsen, die die Energie bündeln. Die IR-Energie wird von Spiegeln auf den FPA reflektiert. Der Sucher ist ein zweidimensionaler, starrender FPA aus 64×64 MerCad (HgCdTe) Detektorelementen. Der FPA verarbeitet die Signale von den Detektoren und leitet ein Signal an den Tracker der Rakete weiter.
Das Staring Array ist ein photo-voltaisches Gerät, bei dem die einfallenden Photonen Elektronen stimulieren und Pixel für Pixel in integrierten Ausleseschaltungen gespeichert werden, die an der Rückseite des Detektors angebracht sind. Diese Elektronen werden in Spannungen umgewandelt, die Bild für Bild aus dem ROIC herausgemultiplext werden.
Kühlung/Kalibrierung
Um effektiv zu funktionieren, muss der FPA gekühlt und kalibriert werden. In anderen Anwendungen werden die IR-Detektoren einer CLU mit einem Dewar-Kolben und einem Stirlingmotor mit geschlossenem Kreislauf gekühlt, aber in der Rakete ist nicht genügend Platz für eine ähnliche Lösung. Vor dem Start aktiviert ein außen am Startrohr montierter Kühler die elektrischen Systeme im Flugkörper und versorgt die Detektoreinheit des Flugkörpers mit kaltem Gas aus einem Joule-Thomson-Expander, während sich der Flugkörper noch im Startrohr befindet. Wenn die Rakete abgefeuert wird, wird diese externe Verbindung unterbrochen und das Kühlgas wird intern von einer Argongasflasche an Bord zugeführt. Das Gas wird in einer kleinen Flasche unter hohem Druck gehalten und enthält genügend Kühlmittel für die Dauer des Fluges von etwa 19 Sekunden.
Der Suchkopf wird mit einem Chopper-Rad kalibriert. Dabei handelt es sich um einen Ventilator mit sechs Schaufeln: fünf schwarze Schaufeln mit niedrigem IR-Emissionsgrad und eine halbreflektierende Schaufel. Diese Schaufeln drehen sich synchronisiert vor der Sucheroptik, so dass der FPA zusätzlich zur Betrachtung der Szene ständig mit Referenzpunkten versorgt wird. Diese Referenzpunkte ermöglichen es dem FPA, das Rauschen zu reduzieren, das durch Ansprechschwankungen der Detektorelemente entsteht.
Stabilisierung
Die Plattform, auf der der Sucher montiert ist, muss in Bezug auf die Bewegung des Raketenkörpers stabilisiert werden, und der Sucher muss bewegt werden, um auf das Ziel ausgerichtet zu bleiben. Das Stabilisierungssystem muss schnelle Beschleunigungen, Auf- und Abwärtsbewegungen sowie seitliche Bewegungen bewältigen. Dies wird durch ein kardanisches System, Beschleunigungssensoren, Kreisel mit rotierender Masse (oder MEMS) und Motoren zum Antrieb der Positionsänderungen der Plattform erreicht. Das System ist im Grunde ein Autopilot. Die Informationen von den Kreiseln werden an die Führungselektronik weitergeleitet, die einen an der Sucherplattform angebrachten Drehmomentmotor antreibt, um den Sucher auf das Ziel auszurichten. Die Drähte, die den Sucher mit dem Rest der Rakete verbinden, sind sorgfältig entworfen, um Bewegungen oder Widerstand auf der Sucherplattform zu vermeiden.
TrackerEdit

Direkte Angriffsflugbahn.
Der Tracker ist der Schlüssel zur Führung/Steuerung für einen eventuellen Treffer. Die Signale von jedem der 4.096 Detektorelemente (64×64 Pixel-Array) im Sucher werden an die integrierten FPA-Ausleseschaltungen weitergeleitet, die dann ein Videobild auslesen, das zur Verarbeitung an das Tracker-System gesendet wird. Durch den Vergleich der einzelnen Frames bestimmt der Tracker die Notwendigkeit einer Korrektur, um den Flugkörper auf dem Ziel zu halten. Der Tracker muss in der Lage sein zu bestimmen, welcher Teil des Bildes das Ziel darstellt. Das Ziel wird zunächst vom Richtschützen definiert, der einen konfigurierbaren Rahmen um das Ziel setzt. Der Tracker verwendet dann Algorithmen, um diesen Bereich des Rahmens auf der Grundlage von Bild-, Geometrie- und Bewegungsdaten mit den neuen Bildrahmen zu vergleichen, die vom Sucher gesendet werden, ähnlich wie bei Algorithmen zur Mustererkennung. Am Ende eines jeden Bildes wird die Referenz aktualisiert. Der Tracker ist in der Lage, das Ziel zu verfolgen, auch wenn sich der Blickwinkel des Suchers im Laufe des Fluges radikal ändern kann.
Um die Rakete zu führen, lokalisiert der Tracker das Ziel im aktuellen Bild und vergleicht diese Position mit dem Zielpunkt. Liegt diese Position außerhalb der Mitte, berechnet der Tracker eine Korrektur und gibt sie an das Lenksystem weiter, das die entsprechenden Anpassungen an den vier beweglichen Heckflossen sowie an den acht festen Flügeln in der Körpermitte vornimmt. Dies ist ein Autopilot. Um die Rakete zu führen, verfügt das System über Sensoren, die überprüfen, ob die Flossen wie gewünscht positioniert sind. Ist dies nicht der Fall, wird die Abweichung an die Steuerung zurückgeschickt, um sie weiter anzupassen. Dies ist ein geschlossener Regelkreis.
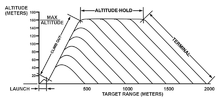
Es gibt drei Flugphasen, die vom Tracker gesteuert werden: 1) eine Anfangsphase direkt nach dem Start; 2) eine Phase in der Mitte des Fluges, die den größten Teil des Fluges andauert; und 3) eine Endphase, in der der Tracker den effektivsten Einschlagspunkt auswählt. Mit Führungsalgorithmen verwendet der Autopilot Daten vom Sucher und Tracker, um zu bestimmen, wann der Flugkörper von einer Flugphase in die nächste übergeht. Je nachdem, ob sich die Rakete im Top-Attack- oder im Direct-Attack-Modus befindet, kann sich das Flugprofil deutlich verändern. Im Top-Attack-Modus steigt die Rakete nach dem Start steil auf und fliegt in großer Höhe, um dann auf die Spitze des Ziels zu stürzen (Curveball). Im direkten Angriffsmodus (Fastball) fliegt die Rakete in geringerer Höhe direkt auf das Ziel zu. Die genaue Flugbahn, die die Entfernung zum Ziel berücksichtigt, wird von der Lenkeinheit berechnet.